 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo action recognition for lane-change classification and prediction of surrounding vehicles
Paper and Code
Jan 13, 2021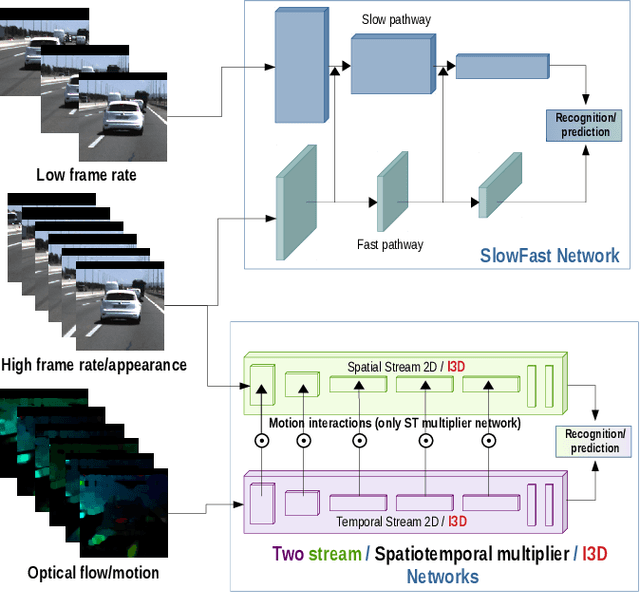
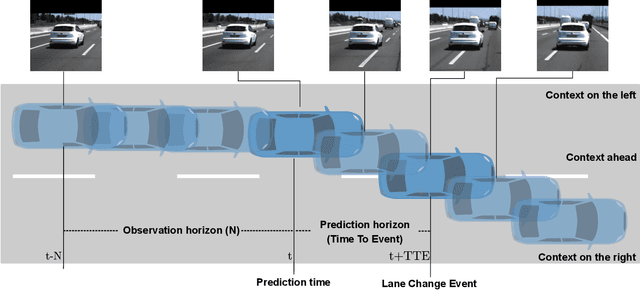
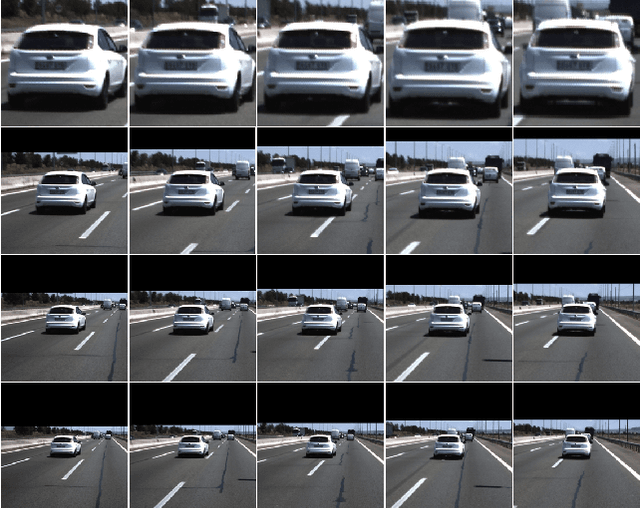
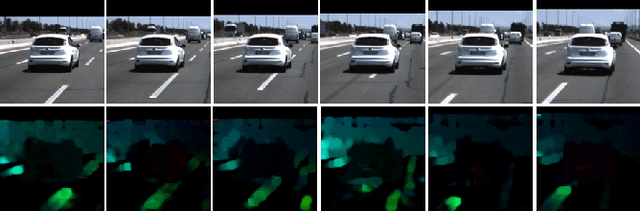
In highway scenarios, an alert human driver will typically anticipate early cut-in/cut-out maneuvers of surrounding vehicles using visual cues mainly. Autonomous vehicles must anticipate these situations at an early stage too, to increase their safety and efficiency. In this work, lane-change recognition and prediction tasks are posed as video action recognition problems. Up to four different two-stream-based approaches, that have been successfully applied to address human action recognition, are adapted here by stacking visual cues from forward-looking video cameras to recognize and anticipate lane-changes of target vehicles. We study the influence of context and observation horizons on performance, and different prediction horizons are analyzed. The different models are trained and evaluated using the PREVENTION dataset. The obtained results clearly demonstrate the potential of these methodologies to serve as robust predictors of future lane-changes of surrounding vehicles proving an accuracy higher than 90% in time horizons of between 1-2 seconds.