 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIDGARD: A Simulation Platform for Autonomous Navigation in Unstructured Environments
May 17, 2022
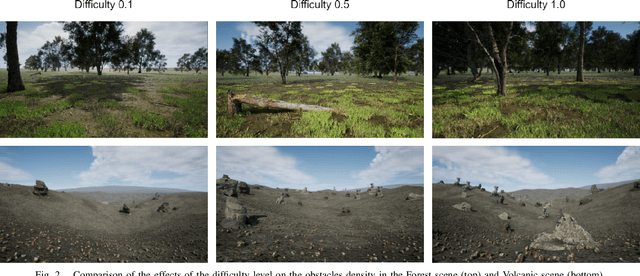
We present MIDGARD, an open source simulation platform for autonomous robot navigation in unstructured outdoor environments. We specifically design MIDGARD to enable training of autonomous agents (e.g., unmanned ground vehicles) in photorealistic 3D environments, and to support the generalization skills of learning-based agents by means of diverse and variable training scenarios. MIDGARD differs from other major simulation platforms in that it proposes a highly configurable procedural landscape generation pipeline, which enables autonomous agents to be trained in diverse scenarios while reducing the efforts and costs needed to create digital content from scratch.
Domain Adaptation for Outdoor Robot Traversability Estimation from RGB data with Safety-Preserving Loss
Sep 16, 2020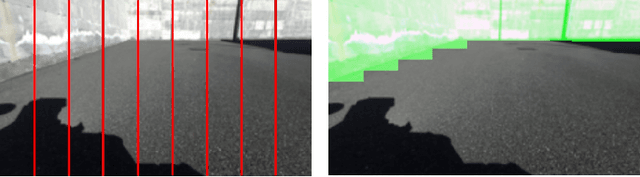
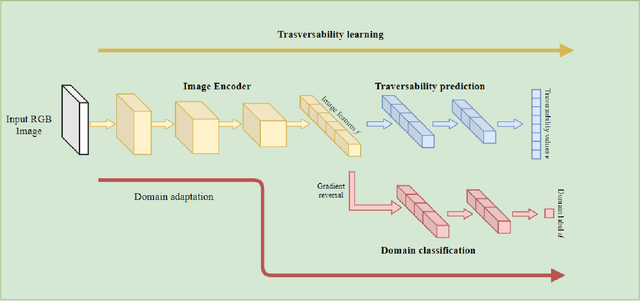
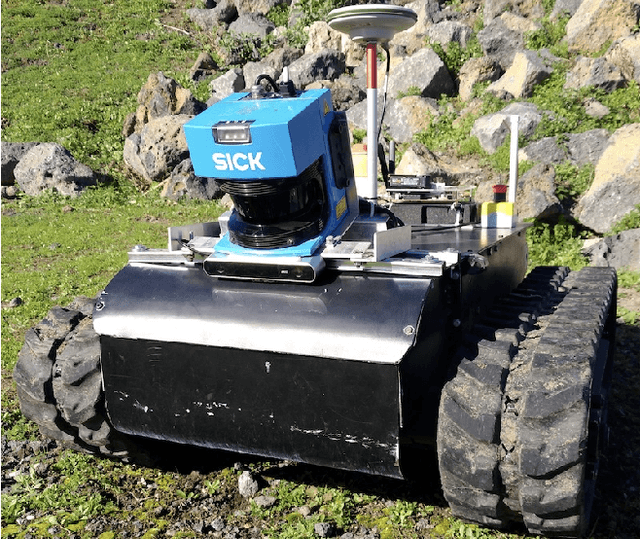
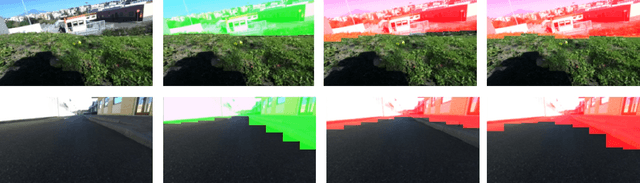
Being able to estimate the traversability of the area surrounding a mobile robot is a fundamental task in the design of a navigation algorithm. However, the task is often complex, since it requires evaluating distances from obstacles, type and slope of terrain, and dealing with non-obvious discontinuities in detected distances due to perspective. In this paper, we present an approach based on deep learning to estimate and anticipate the traversing score of different routes in the field of view of an on-board RGB camera. The backbone of the proposed model is based on a state-of-the-art deep segmentation model, which is fine-tuned on the task of predicting route traversability. We then enhance the model's capabilities by a) addressing domain shifts through gradient-reversal unsupervised adaptation, and b) accounting for the specific safety requirements of a mobile robot, by encouraging the model to err on the safe side, i.e., penalizing errors that would cause collisions with obstacles more than those that would cause the robot to stop in advance. Experimental results show that our approach is able to satisfactorily identify traversable areas and to generalize to unseen locations.