 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep ChArUco: Dark ChArUco Marker Pose Estimation
Dec 08, 2018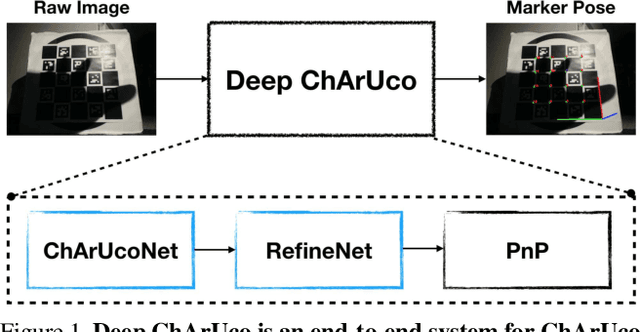

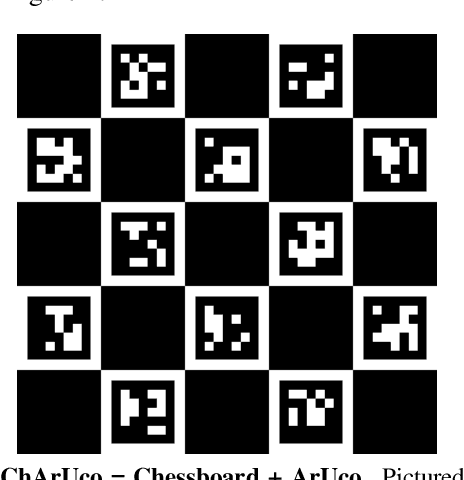
ChArUco boards are used for camera calibration, monocular pose estimation, and pose verification in both robotics and augmented reality. Such fiducials are detectable via traditional computer vision methods (as found in OpenCV) in well-lit environments, but classical methods fail when the lighting is poor or when the image undergoes extreme motion blur. We present Deep ChArUco, a real-time pose estimation system which combines two custom deep networks, ChArUcoNet and RefineNet, with the Perspective-n-Point (PnP) algorithm to estimate the marker's 6DoF pose. ChArUcoNet is a two-headed marker-specific convolutional neural network (CNN) which jointly outputs ID-specific classifiers and 2D point locations. The 2D point locations are further refined into subpixel coordinates using RefineNet. Our networks are trained using a combination of auto-labeled videos of the target marker, synthetic subpixel corner data, and extreme data augmentation. We evaluate Deep ChArUco in challenging low-light, high-motion, high-blur scenarios and demonstrate that our approach is superior to a traditional OpenCV-based method for ChArUco marker detection and pose estimation.
Simulation Results on Selector Adaptation in Behavior Trees
Jun 30, 2016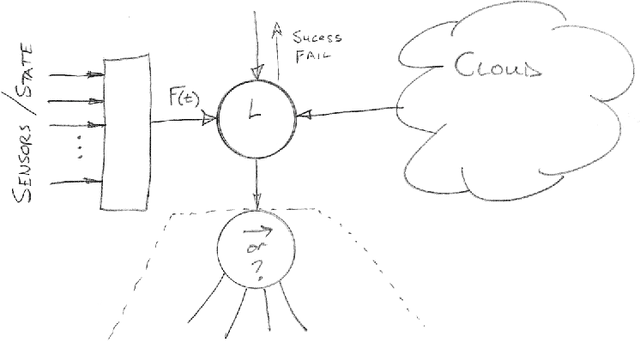
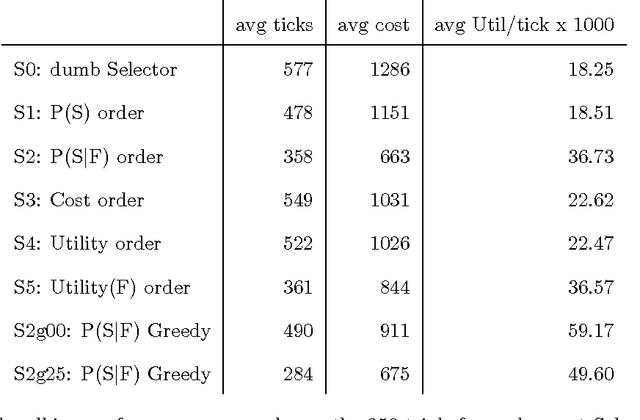
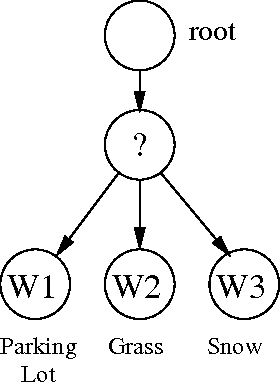
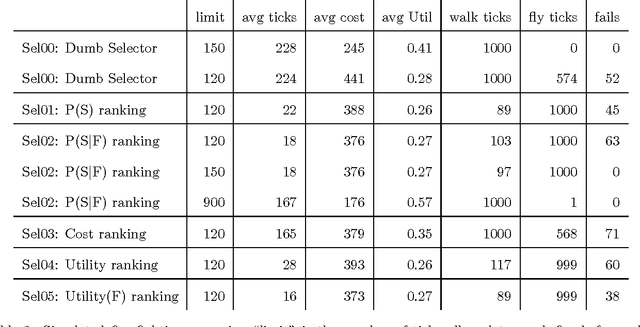
Behavior trees (BTs) emerged from video game development as a graphical language for modeling intelligent agent behavior. However as initially implemented, behavior trees are static plans. This paper adds to recent literature exploring the ability of BTs to adapt to their success or failure in achieving tasks. The "Selector" node of a BT tries alternative strategies (its children) and returns success only if all of its children return failure. This paper studies several means by which Selector nodes can learn from experience, in particular, learn conditional probabilities of success based on sensor information, and modify the execution order based on the learned iformation. Furthermore, a "Greedy Selector" is studied which only tries the child having the highest success probability. Simulation results indicate significantly increased task performance, especially when frequentist probability estimate is conditioned on sensor information. The Greedy selector was ineffective unless it was preceded by a period of training in which all children were exercised.