 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIKBT: solving closed-form Inverse Kinematics with Behavior Tree
Dec 07, 2017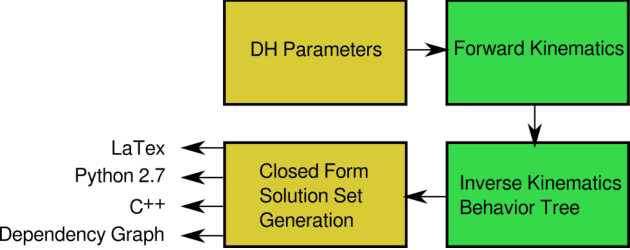
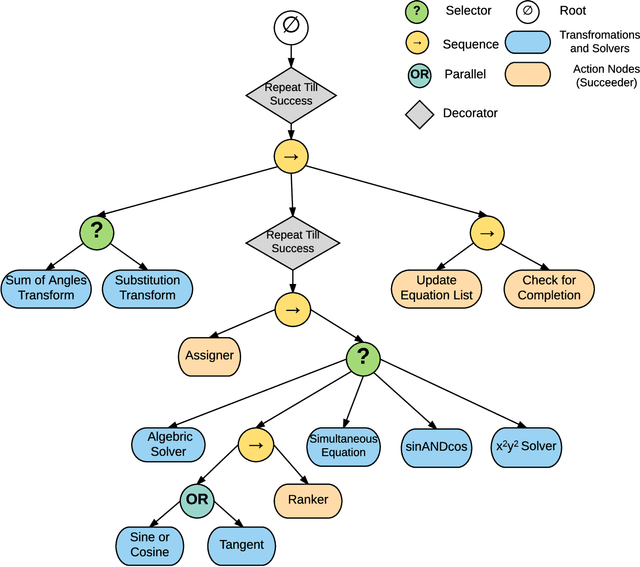
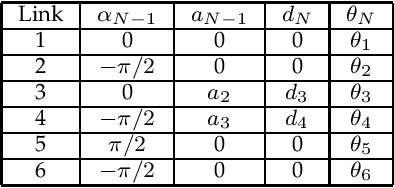
Serial robot arms have complicated kinematic equations which must be solved to write effective arm planning and control software (the Inverse Kinematics Problem). Existing software packages for inverse kinematics often rely on numerical methods which have significant shortcomings. Here we report a new symbolic inverse kinematics solver which overcomes the limitations of numerical methods, and the shortcomings of previous symbolic software packages. We integrate Behavior Trees, an execution planning framework previously used for controlling intelligent robot behavior, to organize the equation solving process, and a modular architecture for each solution technique. The system successfully solved, generated a LaTex report, and generated a Python code template for 18 out of 19 example robots of 4-6 DOF. The system is readily extensible, maintainable, and multi-platform with few dependencies. The complete package is available with a Modified BSD license on Github.
Simulation Results on Selector Adaptation in Behavior Trees
Jun 30, 2016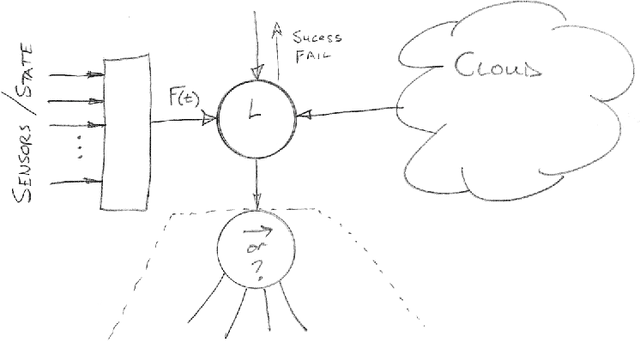
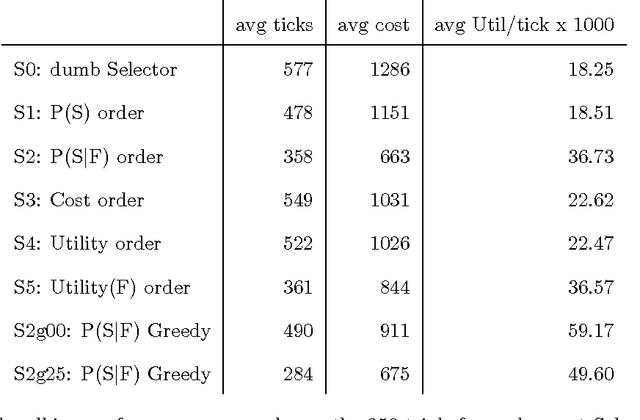
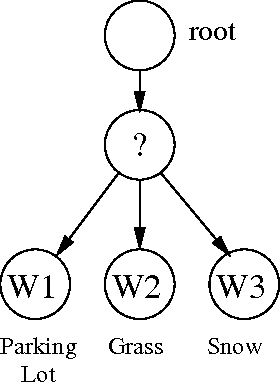
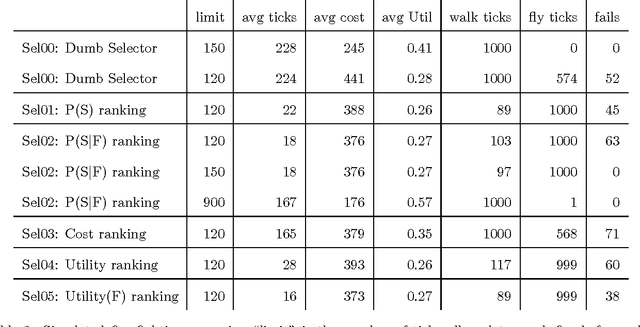
Behavior trees (BTs) emerged from video game development as a graphical language for modeling intelligent agent behavior. However as initially implemented, behavior trees are static plans. This paper adds to recent literature exploring the ability of BTs to adapt to their success or failure in achieving tasks. The "Selector" node of a BT tries alternative strategies (its children) and returns success only if all of its children return failure. This paper studies several means by which Selector nodes can learn from experience, in particular, learn conditional probabilities of success based on sensor information, and modify the execution order based on the learned iformation. Furthermore, a "Greedy Selector" is studied which only tries the child having the highest success probability. Simulation results indicate significantly increased task performance, especially when frequentist probability estimate is conditioned on sensor information. The Greedy selector was ineffective unless it was preceded by a period of training in which all children were exercised.