 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIKBT: solving closed-form Inverse Kinematics with Behavior Tree
Paper and Code
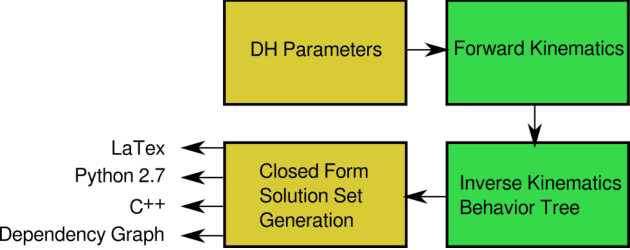
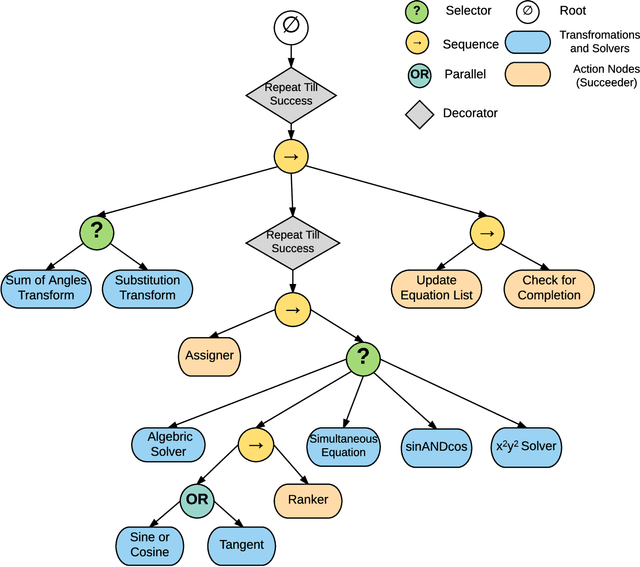
Serial robot arms have complicated kinematic equations which must be solved to write effective arm planning and control software (the Inverse Kinematics Problem). Existing software packages for inverse kinematics often rely on numerical methods which have significant shortcomings. Here we report a new symbolic inverse kinematics solver which overcomes the limitations of numerical methods, and the shortcomings of previous symbolic software packages. We integrate Behavior Trees, an execution planning framework previously used for controlling intelligent robot behavior, to organize the equation solving process, and a modular architecture for each solution technique. The system successfully solved, generated a LaTex report, and generated a Python code template for 18 out of 19 example robots of 4-6 DOF. The system is readily extensible, maintainable, and multi-platform with few dependencies. The complete package is available with a Modified BSD license on Github.