 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNavWAM: A Navigation World Action Model for Goal-Conditioned Visual Navigation
Jun 11, 2026Goal-conditioned visual navigation requires a robot to act under partial observability by anticipating how its motion will change the future egocentric view and whether that change brings it closer to the goal. Navigation world models provide such visual foresight, but they remain prediction modules that require an external planner to convert predicted futures into closed-loop control. We propose Navigation World Action Model (NavWAM), a diffusion-transformer policy that turns navigation world-model prediction into executable action by representing future observations, goal-progress values, and action chunks in a shared latent sequence. By learning future prediction jointly with the action and value targets that determine closed-loop behavior, NavWAM makes visual foresight directly usable for robot control. We build NavWAM through simulation pretraining and real-robot adaptation, and evaluate it on image-goal navigation against planning-based world models and a representative direct navigation policy. Across offline benchmarks and closed-loop real-robot deployment, NavWAM improves over planning-based world-model baselines in our evaluations while using the default policy mode without CEM-style action search. Project page: https://dachii-azm.github.io/navwam/
E3VS-Bench: A Benchmark for Viewpoint-Dependent Active Perception in 3D Gaussian Splatting Scenes
Apr 20, 2026Visual search in 3D environments requires embodied agents to actively explore their surroundings and acquire task-relevant evidence. However, existing visual search and embodied AI benchmarks, including EQA, typically rely on static observations or constrained egocentric motion, and thus do not explicitly evaluate fine-grained viewpoint-dependent phenomena that arise under unrestricted 5-DoF viewpoint control in real-world 3D environments, such as visibility changes caused by vertical viewpoint shifts, revealing contents inside containers, and disambiguating object attributes that are only observable from specific angles. To address this limitation, we introduce {E3VS-Bench}, a benchmark for embodied 3D visual search where agents must control their viewpoints in 5-DoF to gather viewpoint-dependent evidence for question answering. E3VS-Bench consists of 99 high-fidelity 3D scenes reconstructed using 3D Gaussian Splatting and 2,014 question-driven episodes. 3D Gaussian Splatting enables photorealistic free-viewpoint rendering that preserves fine-grained visual details (e.g., small text and subtle attributes) often degraded in mesh-based simulators, thereby allowing the construction of questions that cannot be answered from a single view and instead require active inspection across viewpoints in 5-DoF. We evaluate multiple state-of-the-art VLMs and compare their performance with humans. Despite strong 2D reasoning ability, all models exhibit a substantial gap from humans, highlighting limitations in active perception and coherent viewpoint planning specifically under full 5-DoF viewpoint changes.
Answerability Fields: Answerable Location Estimation via Diffusion Models
Jul 26, 2024



In an era characterized by advancements in artificial intelligence and robotics, enabling machines to interact with and understand their environment is a critical research endeavor. In this paper, we propose Answerability Fields, a novel approach to predicting answerability within complex indoor environments. Leveraging a 3D question answering dataset, we construct a comprehensive Answerability Fields dataset, encompassing diverse scenes and questions from ScanNet. Using a diffusion model, we successfully infer and evaluate these Answerability Fields, demonstrating the importance of objects and their locations in answering questions within a scene. Our results showcase the efficacy of Answerability Fields in guiding scene-understanding tasks, laying the foundation for their application in enhancing interactions between intelligent agents and their environments.
CityNav: Language-Goal Aerial Navigation Dataset with Geographic Information
Jun 20, 2024



Vision-and-language navigation (VLN) aims to guide autonomous agents through real-world environments by integrating visual and linguistic cues. While substantial progress has been made in understanding these interactive modalities in ground-level navigation, aerial navigation remains largely underexplored. This is primarily due to the scarcity of resources suitable for real-world, city-scale aerial navigation studies. To bridge this gap, we introduce CityNav, a new dataset for language-goal aerial navigation using a 3D point cloud representation from real-world cities. CityNav includes 32,637 natural language descriptions paired with human demonstration trajectories, collected from participants via a new web-based 3D simulator developed for this research. Each description specifies a navigation goal, leveraging the names and locations of landmarks within real-world cities. We also provide baseline models of navigation agents that incorporate an internal 2D spatial map representing landmarks referenced in the descriptions. We benchmark the latest aerial navigation baselines and our proposed model on the CityNav dataset. The results using this dataset reveal the following key findings: (i) Our aerial agent models trained on human demonstration trajectories outperform those trained on shortest path trajectories, highlighting the importance of human-driven navigation strategies; (ii) The integration of a 2D spatial map significantly enhances navigation efficiency at city scale. Our dataset and code are available at https://water-cookie.github.io/city-nav-proj/
Map-based Modular Approach for Zero-shot Embodied Question Answering
May 26, 2024Building robots capable of interacting with humans through natural language in the visual world presents a significant challenge in the field of robotics. To overcome this challenge, Embodied Question Answering (EQA) has been proposed as a benchmark task to measure the ability to identify an object navigating through a previously unseen environment in response to human-posed questions. Although some methods have been proposed, their evaluations have been limited to simulations, without experiments in real-world scenarios. Furthermore, all of these methods are constrained by a limited vocabulary for question-and-answer interactions, making them unsuitable for practical applications. In this work, we propose a map-based modular EQA method that enables real robots to navigate unknown environments through frontier-based map creation and address unknown QA pairs using foundation models that support open vocabulary. Unlike the questions of the previous EQA dataset on Matterport 3D (MP3D), questions in our real-world experiments contain various question formats and vocabularies not included in the training data. We conduct comprehensive experiments on virtual environments (MP3D-EQA) and two real-world house environments and demonstrate that our method can perform EQA even in the real world.
Cross3DVG: Baseline and Dataset for Cross-Dataset 3D Visual Grounding on Different RGB-D Scans
May 23, 2023We present Cross3DVG, a novel task for cross-dataset visual grounding in 3D scenes, revealing the limitations of existing 3D visual grounding models using restricted 3D resources and thus easily overfit to a specific 3D dataset. To facilitate Cross3DVG, we have created a large-scale 3D visual grounding dataset containing more than 63k diverse descriptions of 3D objects within 1,380 indoor RGB-D scans from 3RScan with human annotations, paired with the existing 52k descriptions on ScanRefer. We perform Cross3DVG by training a model on the source 3D visual grounding dataset and then evaluating it on the target dataset constructed in different ways (e.g., different sensors, 3D reconstruction methods, and language annotators) without using target labels. We conduct comprehensive experiments using established visual grounding models, as well as a CLIP-based 2D-3D integration method, designed to bridge the gaps between 3D datasets. By performing Cross3DVG tasks, we found that (i) cross-dataset 3D visual grounding has significantly lower performance than learning and evaluation with a single dataset, suggesting much room for improvement in cross-dataset generalization of 3D visual grounding, (ii) better detectors and transformer-based localization modules for 3D grounding are beneficial for enhancing 3D grounding performance and (iii) fusing 2D-3D data using CLIP demonstrates further performance improvements. Our Cross3DVG task will provide a benchmark for developing robust 3D visual grounding models capable of handling diverse 3D scenes while leveraging deep language understanding.
ScanQA: 3D Question Answering for Spatial Scene Understanding
Dec 20, 2021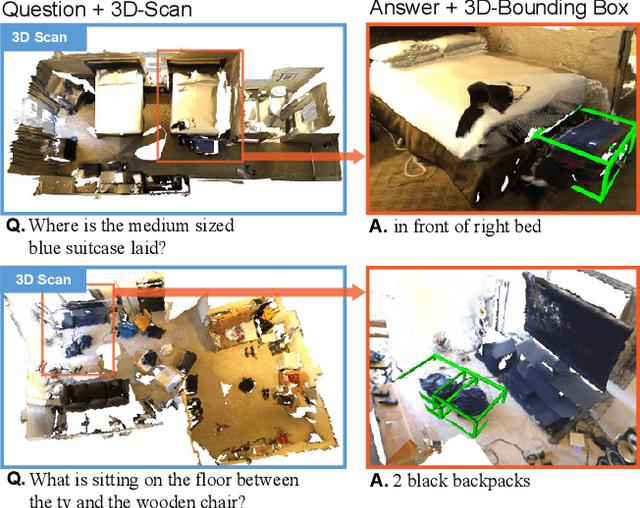



We propose a new 3D spatial understanding task of 3D Question Answering (3D-QA). In the 3D-QA task, models receive visual information from the entire 3D scene of the rich RGB-D indoor scan and answer the given textual questions about the 3D scene. Unlike the 2D-question answering of VQA, the conventional 2D-QA models suffer from problems with spatial understanding of object alignment and directions and fail the object localization from the textual questions in 3D-QA. We propose a baseline model for 3D-QA, named ScanQA model, where the model learns a fused descriptor from 3D object proposals and encoded sentence embeddings. This learned descriptor correlates the language expressions with the underlying geometric features of the 3D scan and facilitates the regression of 3D bounding boxes to determine described objects in textual questions. We collected human-edited question-answer pairs with free-form answers that are grounded to 3D objects in each 3D scene. Our new ScanQA dataset contains over 41K question-answer pairs from the 800 indoor scenes drawn from the ScanNet dataset. To the best of our knowledge, ScanQA is the first large-scale effort to perform object-grounded question-answering in 3D environments.