 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Behavior Recognition via Interwoven Deep Convolutional Neural Nets with Multi-stream Inputs
Nov 22, 2018
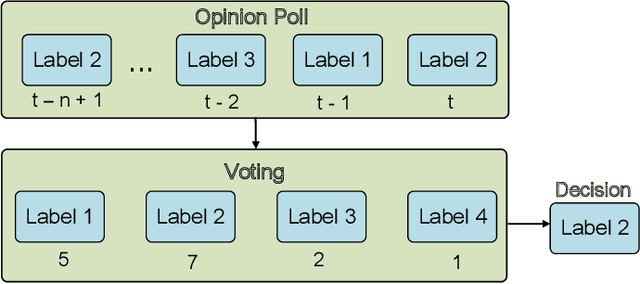
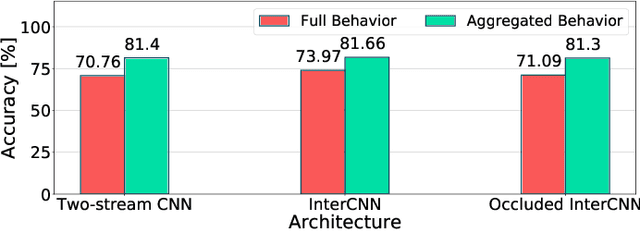
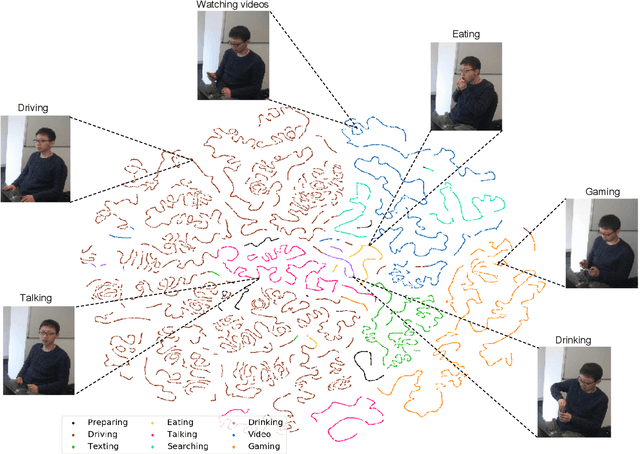
Recognizing driver behaviors is becoming vital for in-vehicle systems that seek to reduce the incidence of car accidents rooted in cognitive distraction. In this paper, we harness the exceptional feature extraction abilities of deep learning and propose a dedicated Interwoven Deep Convolutional Neural Network (InterCNN) architecture to tackle the accurate classification of driver behaviors in real-time. The proposed solution exploits information from multi-stream inputs, i.e., in-vehicle cameras with different fields of view and optical flows computed based on recorded images, and merges through multiple fusion layers abstract features that it extracts. This builds a tight ensembling system, which significantly improves the robustness of the model. We further introduce a temporal voting scheme based on historical inference instances, in order to enhance accuracy. Experiments conducted with a real world dataset that we collect in a mock-up car environment demonstrate that the proposed InterCNN with MobileNet convolutional blocks can classify 9 different behaviors with 73.97% accuracy, and 5 aggregated behaviors with 81.66% accuracy. Our architecture is highly computationally efficient, as it performs inferences within 15ms, which satisfies the real-time constraints of intelligent cars. In addition, our InterCNN is robust to lossy input, as the classification remains accurate when two input streams are occluded.
A Block Coordinate Ascent Algorithm for Mean-Variance Optimization
Nov 01, 2018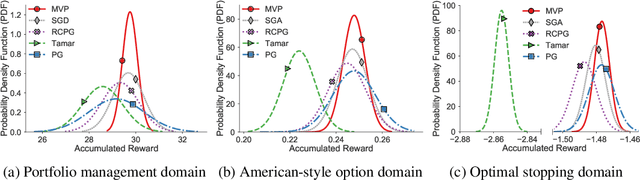
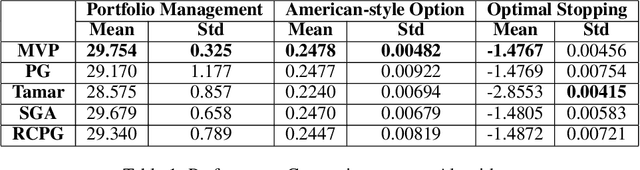
Risk management in dynamic decision problems is a primary concern in many fields, including financial investment, autonomous driving, and healthcare. The mean-variance function is one of the most widely used objective functions in risk management due to its simplicity and interpretability. Existing algorithms for mean-variance optimization are based on multi-time-scale stochastic approximation, whose learning rate schedules are often hard to tune, and have only asymptotic convergence proof. In this paper, we develop a model-free policy search framework for mean-variance optimization with finite-sample error bound analysis (to local optima). Our starting point is a reformulation of the original mean-variance function with its Fenchel dual, from which we propose a stochastic block coordinate ascent policy search algorithm. Both the asymptotic convergence guarantee of the last iteration's solution and the convergence rate of the randomly picked solution are provided, and their applicability is demonstrated on several benchmark domains.