 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoencoder Based Iterative Modeling and Multivariate Time-Series Subsequence Clustering Algorithm
Sep 09, 2022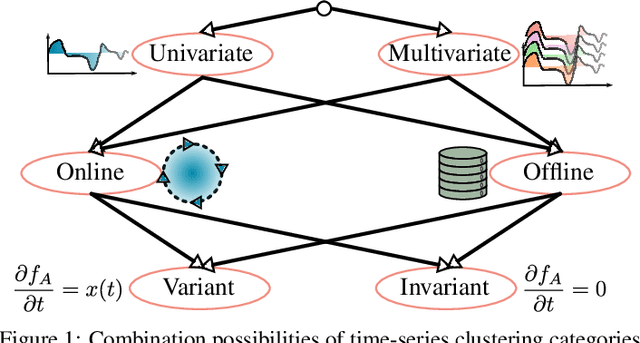
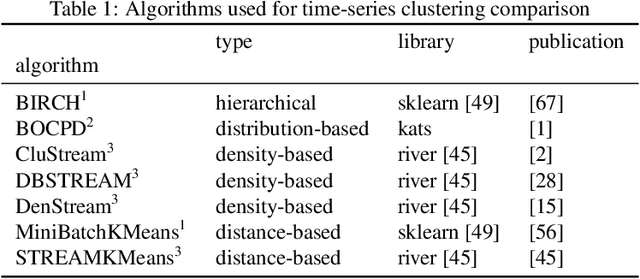
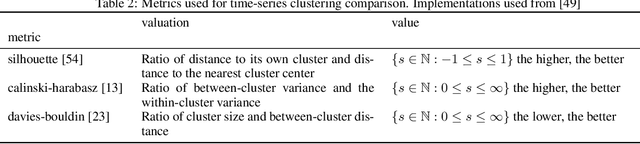
This paper introduces an algorithm for the detection of change-points and the identification of the corresponding subsequences in transient multivariate time-series data (MTSD). The analysis of such data has become more and more important due to the increase of availability in many industrial fields. Labeling, sorting or filtering highly transient measurement data for training condition based maintenance (CbM) models is cumbersome and error-prone. For some applications it can be sufficient to filter measurements by simple thresholds or finding change-points based on changes in mean value and variation. But a robust diagnosis of a component within a component group for example, which has a complex non-linear correlation between multiple sensor values, a simple approach would not be feasible. No meaningful and coherent measurement data which could be used for training a CbM model would emerge. Therefore, we introduce an algorithm which uses a recurrent neural network (RNN) based Autoencoder (AE) which is iteratively trained on incoming data. The scoring function uses the reconstruction error and latent space information. A model of the identified subsequence is saved and used for recognition of repeating subsequences as well as fast offline clustering. For evaluation, we propose a new similarity measure based on the curvature for a more intuitive time-series subsequence clustering metric. A comparison with seven other state-of-the-art algorithms and eight datasets shows the capability and the increased performance of our algorithm to cluster MTSD online and offline in conjunction with mechatronic systems.
Improving Semi-Supervised Learning for Remaining Useful Lifetime Estimation Through Self-Supervision
Aug 26, 2021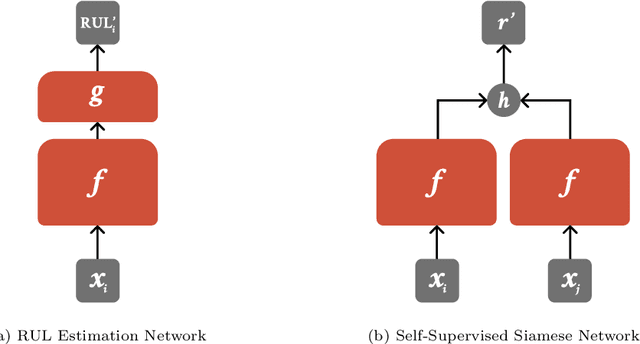
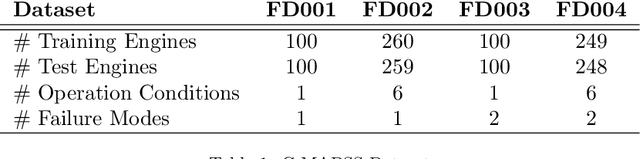
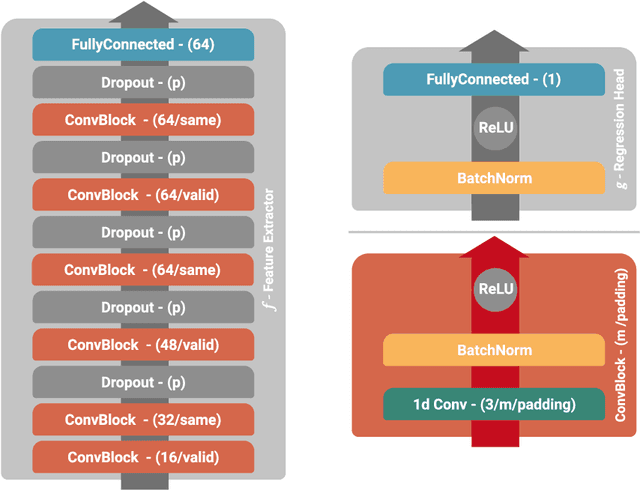

RUL estimation suffers from a server data imbalance where data from machines near their end of life is rare. Additionally, the data produced by a machine can only be labeled after the machine failed. Semi-Supervised Learning (SSL) can incorporate the unlabeled data produced by machines that did not yet fail. Previous work on SSL evaluated their approaches under unrealistic conditions where the data near failure was still available. Even so, only moderate improvements were made. This paper proposes a novel SSL approach based on self-supervised pre-training. The method can outperform two competing approaches from the literature and a supervised baseline under realistic conditions on the NASA C-MAPSS dataset.
Non-Autoregressive vs Autoregressive Neural Networks for System Identification
May 05, 2021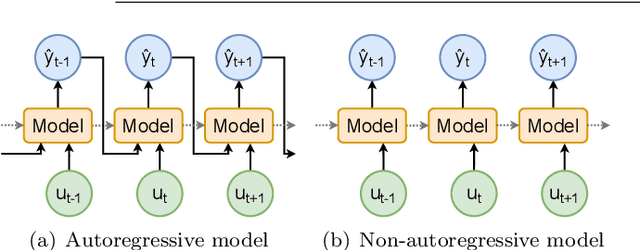
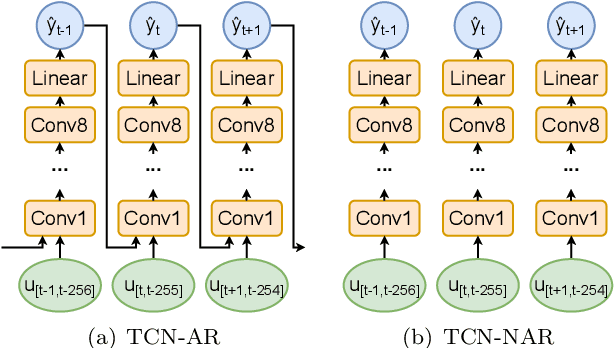

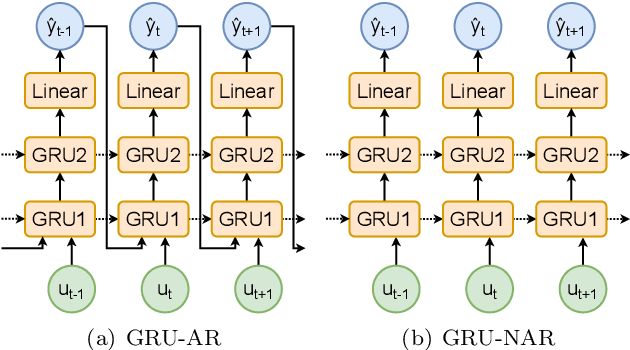
The application of neural networks to non-linear dynamic system identification tasks has a long history, which consists mostly of autoregressive approaches. Autoregression, the usage of the model outputs of previous time steps, is a method of transferring a system state between time steps, which is not necessary for modeling dynamic systems with modern neural network structures, such as gated recurrent units (GRUs) and Temporal Convolutional Networks (TCNs). We compare the accuracy and execution performance of autoregressive and non-autoregressive implementations of a GRU and TCN on the simulation task of three publicly available system identification benchmarks. Our results show, that the non-autoregressive neural networks are significantly faster and at least as accurate as their autoregressive counterparts. Comparisons with other state-of-the-art black-box system identification methods show, that our implementation of the non-autoregressive GRU is the best performing neural network-based system identification method, and in the benchmarks without extrapolation, the best performing black-box method.
RIANN -- A Robust Neural Network Outperforms Attitude Estimation Filters
May 05, 2021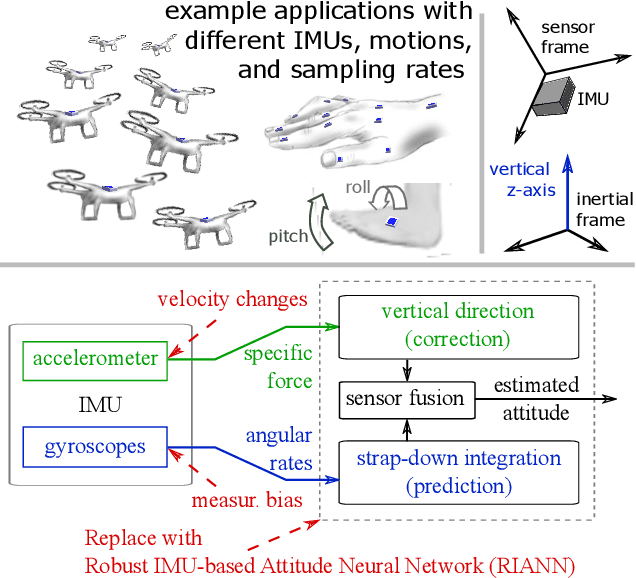
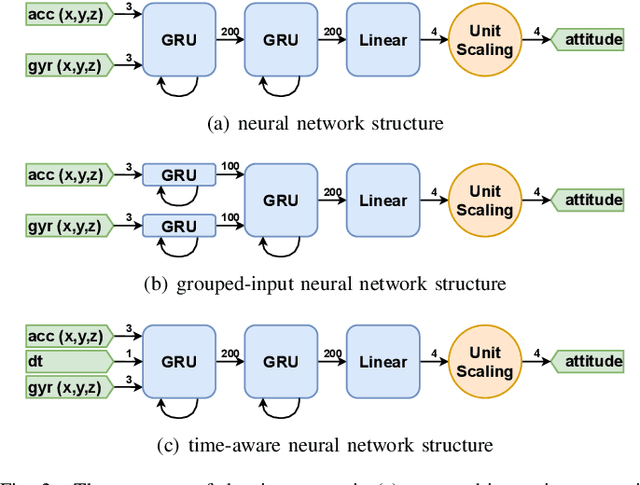
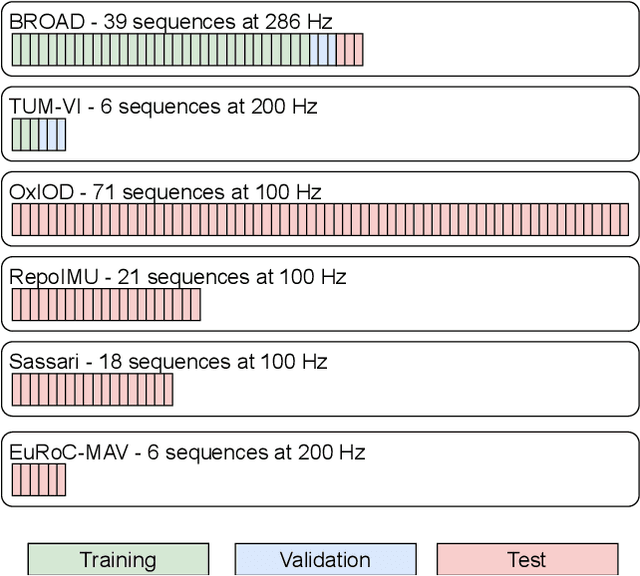
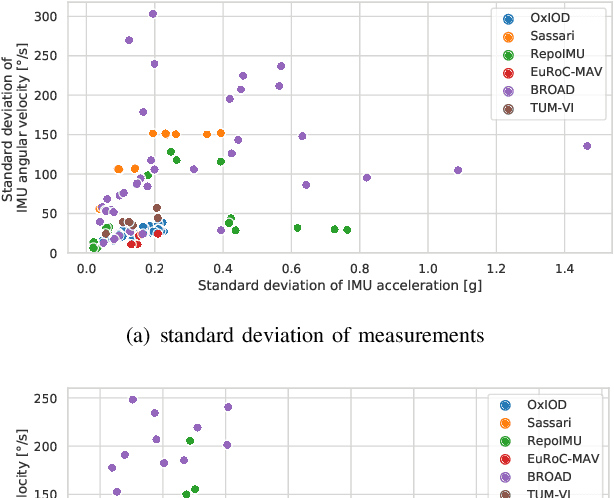
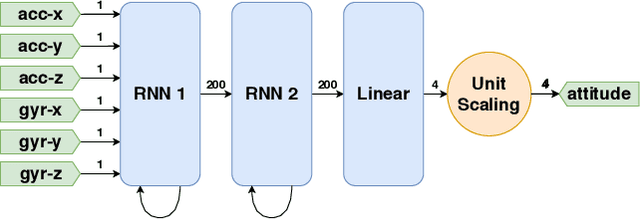
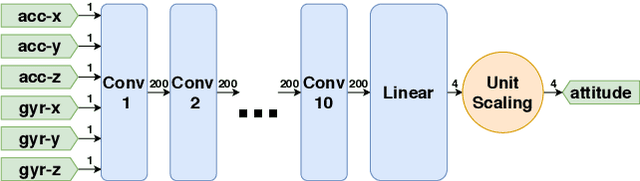
Inertial-sensor-based attitude estimation is a crucial technology in various applications, from human motion tracking to autonomous aerial and ground vehicles. Application scenarios differ in characteristics of the performed motion, presence of disturbances, and environmental conditions. Since state-of-the-art attitude estimators do not generalize well over these characteristics, their parameters must be tuned for the individual motion characteristics and circumstances. We propose RIANN, a real-time-capable neural network for robust IMU-based attitude estimation, which generalizes well across different motion dynamics, environments, and sampling rates, without the need for application-specific adaptations. We exploit two publicly available datasets for the method development and the training, and we add four completely different datasets for evaluation of the trained neural network in three different test scenarios with varying practical relevance. Results show that RIANN performs at least as well as state-of-the-art attitude estimation filters and outperforms them in several cases, even if the filter is tuned on the very same test dataset itself while RIANN has never seen data from that dataset, from the specific application, the same sensor hardware, or the same sampling frequency before. RIANN is expected to enable plug-and-play solutions in numerous applications, especially when accuracy is crucial but no ground-truth data is available for tuning or when motion and disturbance characteristics are uncertain. We made RIANN publicly available.
Neural Networks Versus Conventional Filters for Inertial-Sensor-based Attitude Estimation
Jun 03, 2020
Inertial measurement units are commonly used to estimate the attitude of moving objects. Numerous nonlinear filter approaches have been proposed for solving the inherent sensor fusion problem. However, when a large range of different dynamic and static rotational and translational motions is considered, the attainable accuracy is limited by the need for situation-dependent adjustment of accelerometer and gyroscope fusion weights. We investigate to what extent these limitations can be overcome by means of artificial neural networks and how much domain-specific optimization of the neural network model is required to outperform the conventional filter solution. A diverse set of motion recordings with a marker-based optical ground truth is used for performance evaluation and comparison. The proposed neural networks are found to outperform the conventional filter across all motions only if domain-specific optimizations are introduced. We conclude that they are a promising tool for inertial-sensor-based real-time attitude estimation, but both expert knowledge and rich datasets are required to achieve top performance.
Modeling and Control with Local Linearizing Nadaraya Watson Regression
Sep 22, 2008
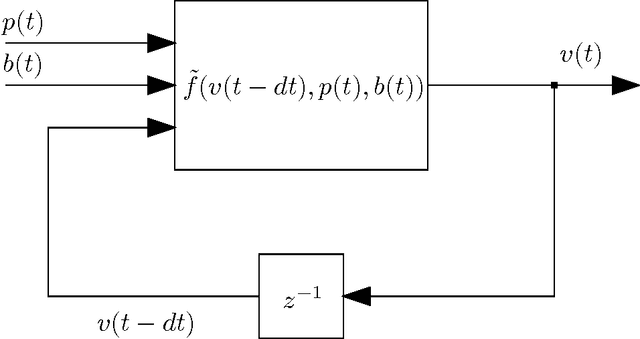
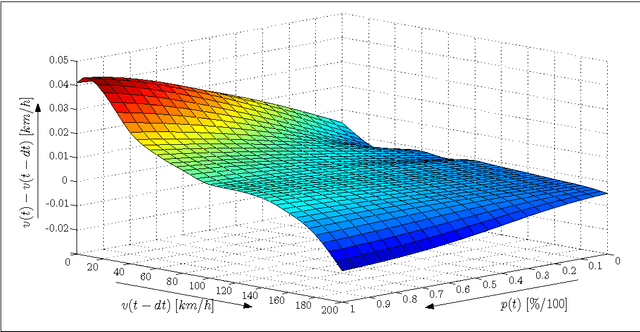
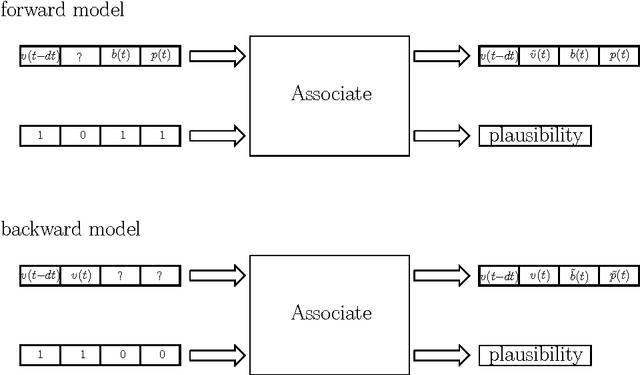
Black box models of technical systems are purely descriptive. They do not explain why a system works the way it does. Thus, black box models are insufficient for some problems. But there are numerous applications, for example, in control engineering, for which a black box model is absolutely sufficient. In this article, we describe a general stochastic framework with which such models can be built easily and fully automated by observation. Furthermore, we give a practical example and show how this framework can be used to model and control a motorcar powertrain.