 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Autoregressive vs Autoregressive Neural Networks for System Identification
Paper and Code
May 05, 2021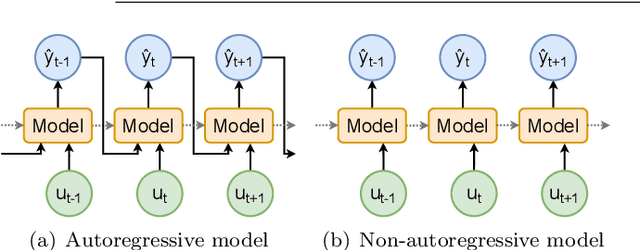
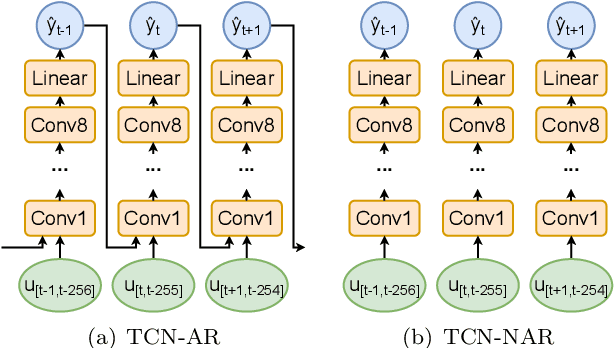

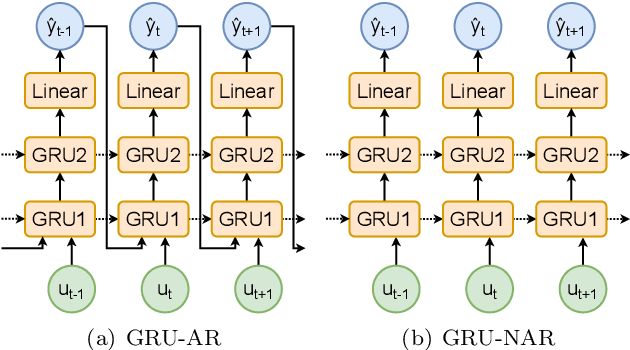
The application of neural networks to non-linear dynamic system identification tasks has a long history, which consists mostly of autoregressive approaches. Autoregression, the usage of the model outputs of previous time steps, is a method of transferring a system state between time steps, which is not necessary for modeling dynamic systems with modern neural network structures, such as gated recurrent units (GRUs) and Temporal Convolutional Networks (TCNs). We compare the accuracy and execution performance of autoregressive and non-autoregressive implementations of a GRU and TCN on the simulation task of three publicly available system identification benchmarks. Our results show, that the non-autoregressive neural networks are significantly faster and at least as accurate as their autoregressive counterparts. Comparisons with other state-of-the-art black-box system identification methods show, that our implementation of the non-autoregressive GRU is the best performing neural network-based system identification method, and in the benchmarks without extrapolation, the best performing black-box method.