 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIdentification of geometrical and elastostatic parameters of heavy industrial robots
Nov 26, 2013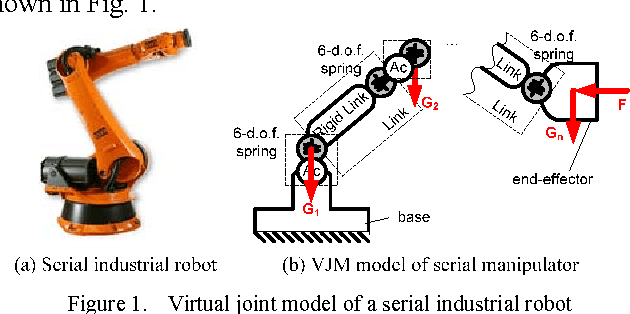
The paper focuses on the stiffness modeling of heavy industrial robots with gravity compensators. The main attention is paid to the identification of geometrical and elastostatic parameters and calibration accuracy. To reduce impact of the measurement errors, the set of manipulator configurations for calibration experiments is optimized with respect to the proposed performance measure related to the end-effector position accuracy. Experimental results are presented that illustrate the advantages of the developed technique.
* arXiv admin note: substantial text overlap with arXiv:1311.6674
Modelling of the gravity compensators in robotic manufacturing cells
Nov 26, 2013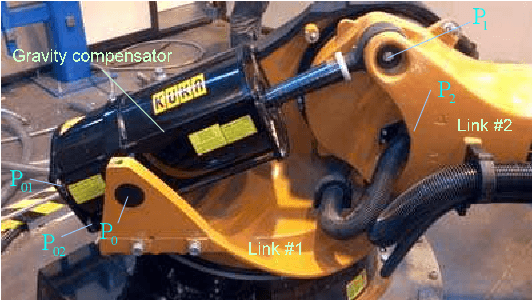
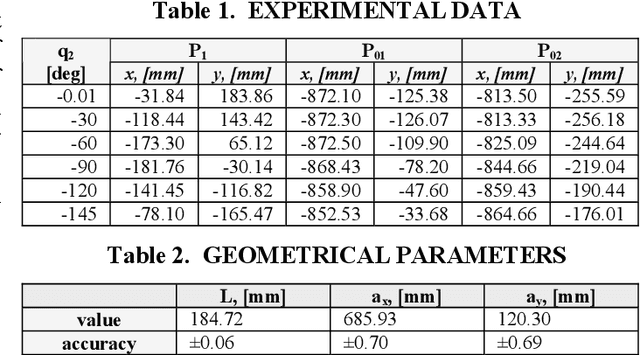
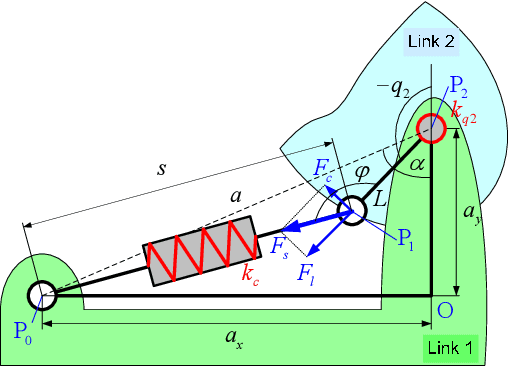
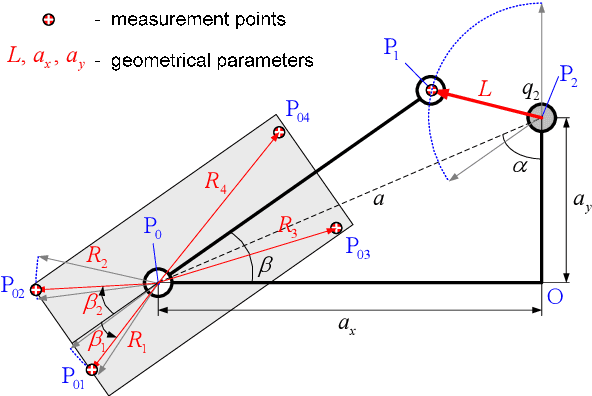
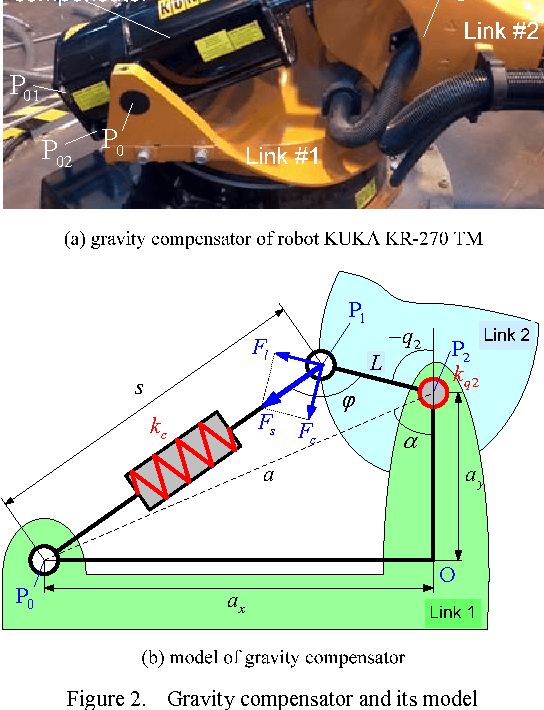
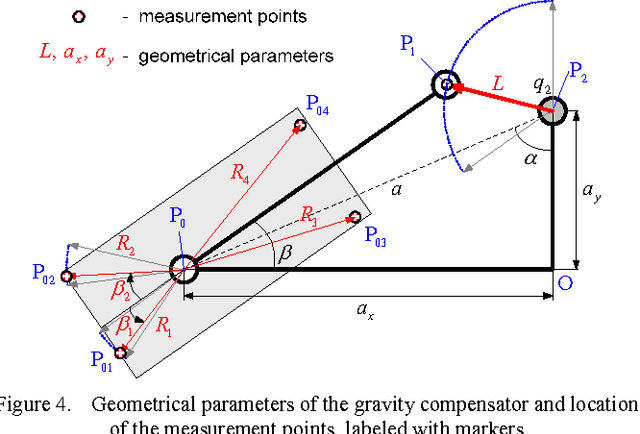
The paper deals with the modeling and identification of the gravity compensators used in heavy industrial robots. The main attention is paid to the geometrical parameters identification and calibration accuracy. To reduce impact of the measurement errors, the design of calibration experiments is used. The advantages of the developed technique are illustrated by experimental results