Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling of the gravity compensators in robotic manufacturing cells
Paper and Code
Nov 26, 2013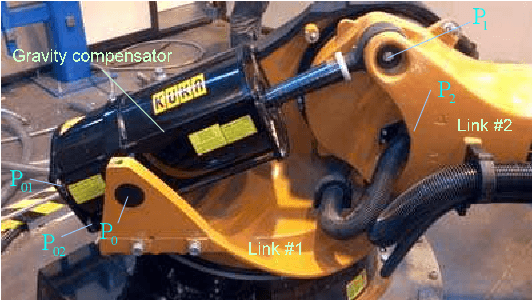
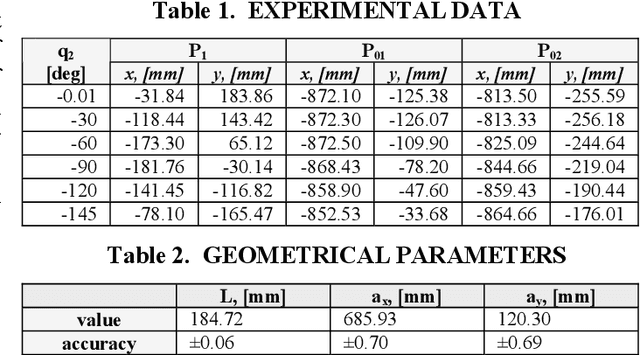
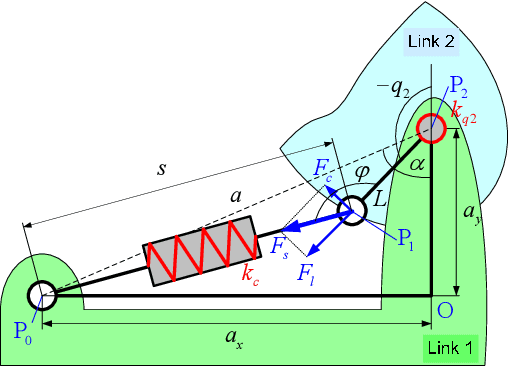
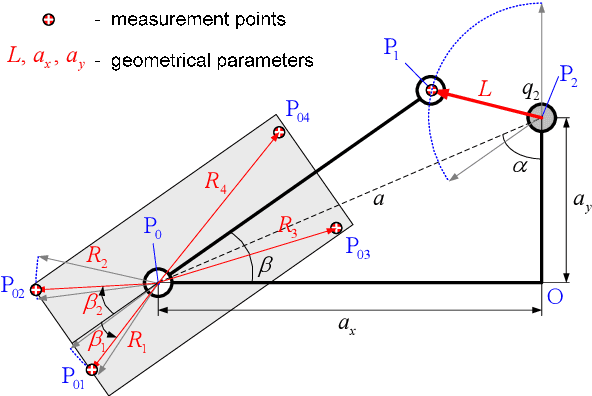
The paper deals with the modeling and identification of the gravity compensators used in heavy industrial robots. The main attention is paid to the geometrical parameters identification and calibration accuracy. To reduce impact of the measurement errors, the design of calibration experiments is used. The advantages of the developed technique are illustrated by experimental results
* The IFAC Conference on Manufacturing Modeling, Management and
Control (MIM 2013), Saint Petersburg : Russian Federation (2013)
View paper on