 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMROP: Modulated Rank-One Projections for compressive radio interferometric imaging
Apr 25, 2025The emerging generation of radio-interferometric (RI) arrays are set to form images of the sky with a new regime of sensitivity and resolution. This implies a significant increase in visibility data volumes, scaling as $\mathcal{O}(Q^{2}B)$ for $Q$ antennas and $B$ short-time integration intervals (or batches), calling for efficient data dimensionality reduction techniques. This paper proposes a new approach to data compression during acquisition, coined modulated rank-one projection (MROP). MROP compresses the $Q\times Q$ batchwise covariance matrix into a smaller number $P$ of random rank-one projections and compresses across time by trading $B$ for a smaller number $M$ of random modulations of the ROP measurement vectors. Firstly, we introduce a dual perspective on the MROP acquisition, which can either be understood as random beamforming, or as a post-correlation compression. Secondly, we analyse the noise statistics of MROPs and demonstrate that the random projections induce a uniform noise level across measurements independently of the visibility-weighting scheme used. Thirdly, we propose a detailed analysis of the memory and computational cost requirements across the data acquisition and image reconstruction stages, with comparison to state-of-the-art dimensionality reduction approaches. Finally, the MROP model is validated in simulation for monochromatic intensity imaging, with comparison to the classical and baseline-dependent averaging (BDA) models, and using the uSARA optimisation algorithm for image formation. An extensive experimental setup is considered, with ground-truth images containing diffuse and faint emission and spanning a wide variety of dynamic ranges, and for a range of $uv$-coverages corresponding to VLA and MeerKAT observation.
Towards a robust R2D2 paradigm for radio-interferometric imaging: revisiting DNN training and architecture
Mar 04, 2025The R2D2 Deep Neural Network (DNN) series was recently introduced for image formation in radio interferometry. It can be understood as a learned version of CLEAN, whose minor cycles are substituted with DNNs. We revisit R2D2 on the grounds of series convergence, training methodology, and DNN architecture, improving its robustness in terms of generalisability beyond training conditions, capability to deliver high data fidelity, and epistemic uncertainty. Firstly, while still focusing on telescope-specific training, we enhance the learning process by randomising Fourier sampling integration times, incorporating multi-scan multi-noise configurations, and varying imaging settings, including pixel resolution and visibility-weighting scheme. Secondly, we introduce a convergence criterion whereby the reconstruction process stops when the data residual is compatible with noise, rather than simply using all available DNNs. This not only increases the reconstruction efficiency by reducing its computational cost, but also refines training by pruning out the data/image pairs for which optimal data fidelity is reached before training the next DNN. Thirdly, we substitute R2D2's early U-Net DNN with a novel architecture (U-WDSR) combining U-Net and WDSR, which leverages wide activation, dense connections, weight normalisation, and low-rank convolution to improve feature reuse and reconstruction precision. As previously, R2D2 was trained for monochromatic intensity imaging with the Very Large Array (VLA) at fixed $512 \times 512$ image size. Simulations on a wide range of inverse problems and a case study on real data reveal that the new R2D2 model consistently outperforms its earlier version in image reconstruction quality, data fidelity, and epistemic uncertainty.
Scalable Non-Cartesian Magnetic Resonance Imaging with R2D2
Mar 27, 2024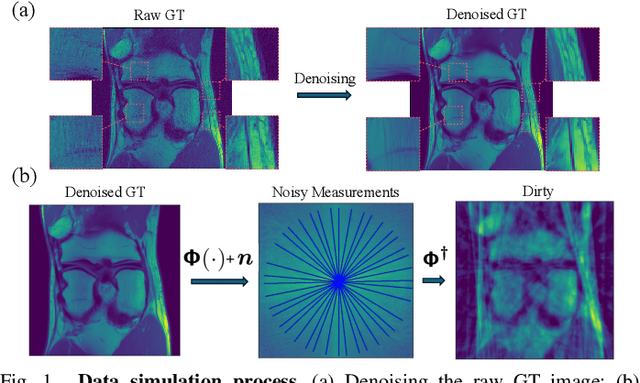
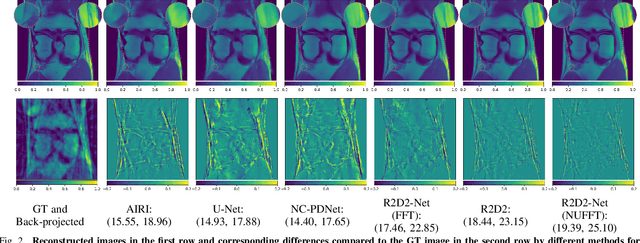
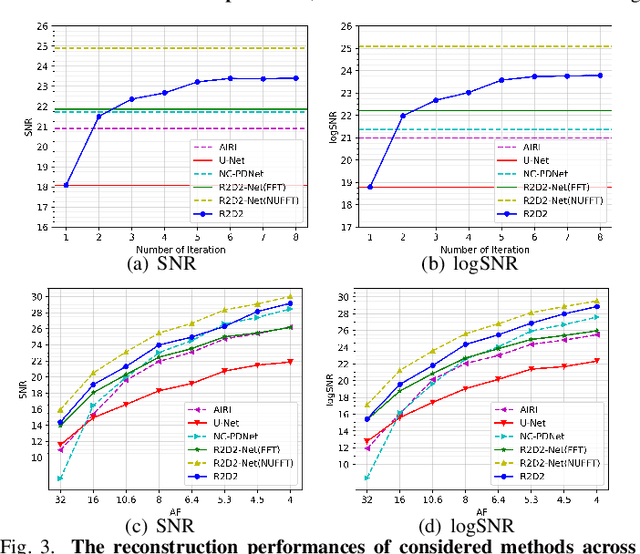
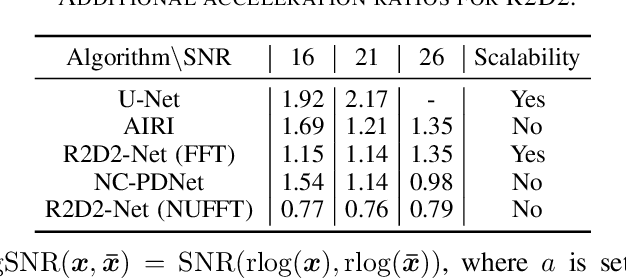
We propose a new approach for non-Cartesian magnetic resonance image reconstruction. While unrolled architectures provide robustness via data-consistency layers, embedding measurement operators in Deep Neural Network (DNN) can become impractical at large scale. Alternative Plug-and-Play (PnP) approaches, where the denoising DNNs are blind to the measurement setting, are not affected by this limitation and have also proven effective, but their highly iterative nature also affects scalability. To address this scalability challenge, we leverage the "Residual-to-Residual DNN series for high-Dynamic range imaging (R2D2)" approach recently introduced in astronomical imaging. R2D2's reconstruction is formed as a series of residual images, iteratively estimated as outputs of DNNs taking the previous iteration's image estimate and associated data residual as inputs. The method can be interpreted as a learned version of the Matching Pursuit algorithm. We demonstrate R2D2 in simulation, considering radial k-space sampling acquisition sequences. Our preliminary results suggest that R2D2 achieves: (i) suboptimal performance compared to its unrolled incarnation R2D2-Net, which is however non-scalable due to the necessary embedding of NUFFT-based data-consistency layers; (ii) superior reconstruction quality to a scalable version of R2D2-Net embedding an FFT-based approximation for data consistency; (iii) superior reconstruction quality to PnP, while only requiring few iterations.
R2D2 image reconstruction with model uncertainty quantification in radio astronomy
Mar 26, 2024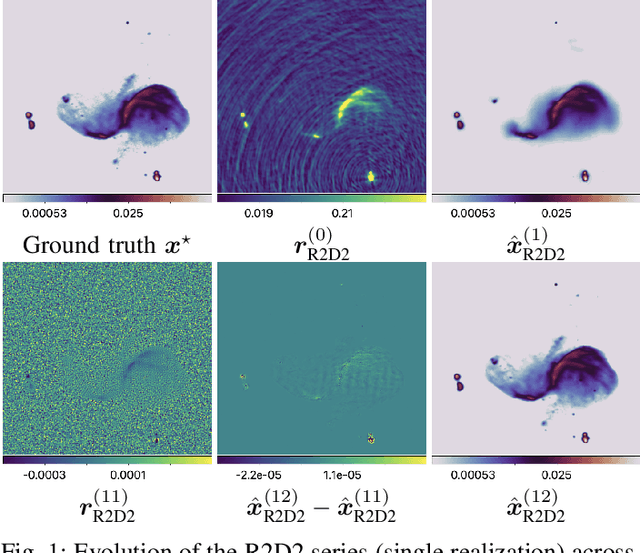
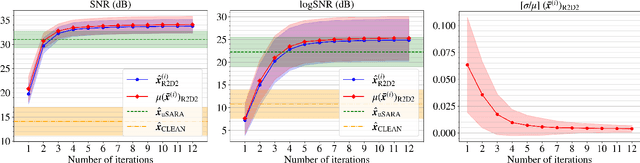
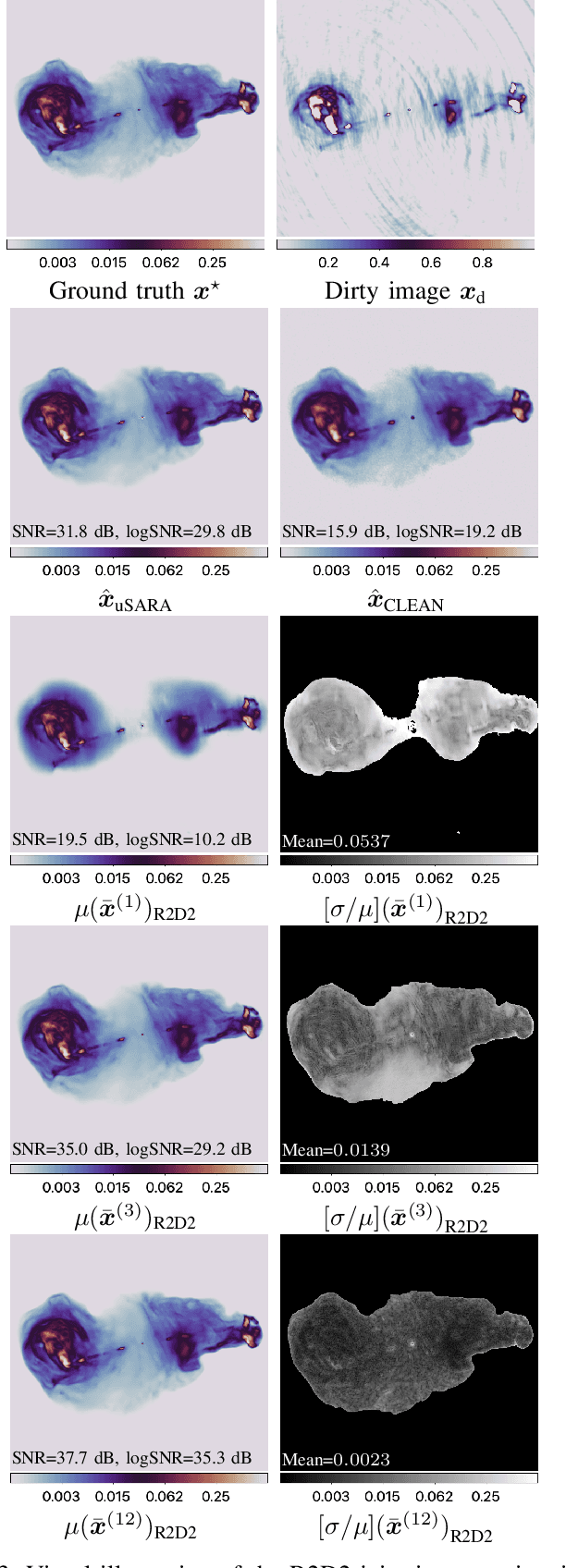
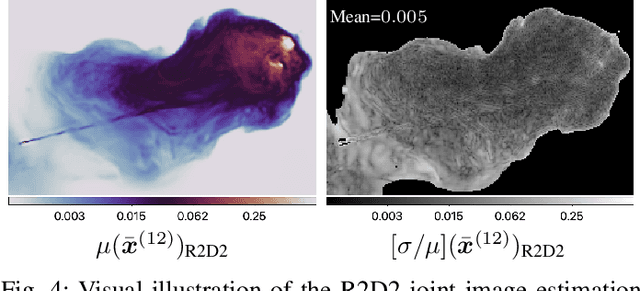
The ``Residual-to-Residual DNN series for high-Dynamic range imaging'' (R2D2) approach was recently introduced for Radio-Interferometric (RI) imaging in astronomy. R2D2's reconstruction is formed as a series of residual images, iteratively estimated as outputs of Deep Neural Networks (DNNs) taking the previous iteration's image estimate and associated data residual as inputs. In this work, we investigate the robustness of the R2D2 image estimation process, by studying the uncertainty associated with its series of learned models. Adopting an ensemble averaging approach, multiple series can be trained, arising from different random DNN initializations of the training process at each iteration. The resulting multiple R2D2 instances can also be leveraged to generate ``R2D2 samples'', from which empirical mean and standard deviation endow the algorithm with a joint estimation and uncertainty quantification functionality. Focusing on RI imaging, and adopting a telescope-specific approach, multiple R2D2 instances were trained to encompass the most general observation setting of the Very Large Array (VLA). Simulations and real-data experiments confirm that: (i) R2D2's image estimation capability is superior to that of the state-of-the-art algorithms; (ii) its ultra-fast reconstruction capability (arising from series with only few DNNs) makes the computation of multiple reconstruction samples and of uncertainty maps practical even at large image dimension; (iii) it is characterized by a very low model uncertainty.
The R2D2 deep neural network series paradigm for fast precision imaging in radio astronomy
Mar 12, 2024Radio-interferometric (RI) imaging entails solving high-resolution high-dynamic range inverse problems from large data volumes. Recent image reconstruction techniques grounded in optimization theory have demonstrated remarkable capability for imaging precision, well beyond CLEAN's capability. These range from advanced proximal algorithms propelled by handcrafted regularization operators, such as the SARA family, to hybrid plug-and-play (PnP) algorithms propelled by learned regularization denoisers, such as AIRI. Optimization and PnP structures are however highly iterative, which hinders their ability to handle the extreme data sizes expected from future instruments. To address this scalability challenge, we introduce a novel deep learning approach, dubbed ``Residual-to-Residual DNN series for high-Dynamic range imaging''. R2D2's reconstruction is formed as a series of residual images, iteratively estimated as outputs of Deep Neural Networks (DNNs) taking the previous iteration's image estimate and associated data residual as inputs. It thus takes a hybrid structure between a PnP algorithm and a learned version of the matching pursuit algorithm that underpins CLEAN. We present a comprehensive study of our approach, featuring its multiple incarnations distinguished by their DNN architectures. We provide a detailed description of its training process, targeting a telescope-specific approach. R2D2's capability to deliver high precision is demonstrated in simulation, across a variety of image and observation settings using the Very Large Array (VLA). Its reconstruction speed is also demonstrated: with only few iterations required to clean data residuals at dynamic ranges up to 100000, R2D2 opens the door to fast precision imaging. R2D2 codes are available in the BASPLib library on GitHub.