 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeATI-CTLO:Adaptive Temporal Interval-based Continuous-Time LiDAR-Only Odometry
Jul 30, 2024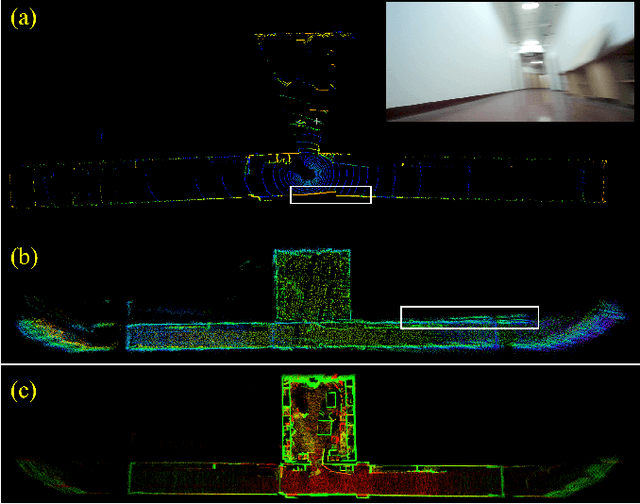
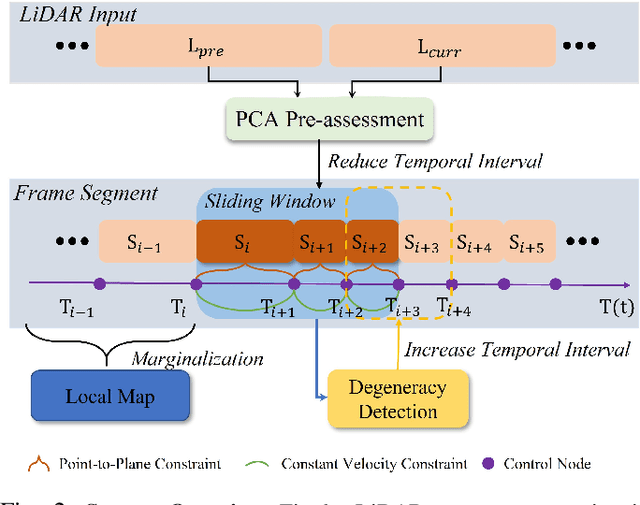
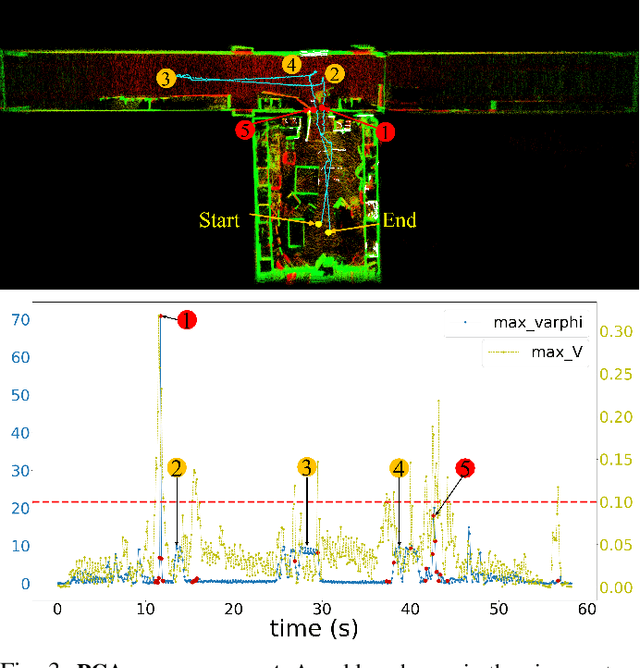
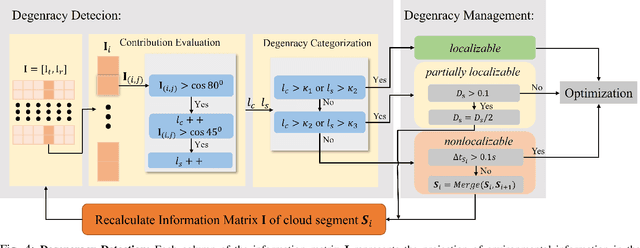
The motion distortion in LiDAR scans caused by aggressive robot motion and varying terrain features significantly impacts the positioning and mapping performance of 3D LiDAR odometry. Existing distortion correction solutions often struggle to balance computational complexity and accuracy. In this work, we propose an Adaptive Temporal Interval-based Continuous-Time LiDAR-only Odometry, utilizing straightforward and efficient linear interpolation. Our method flexibly adjusts the temporal intervals between control nodes according to the dynamics of motion and environmental characteristics. This adaptability enhances performance across various motion states and improves robustness in challenging, feature-sparse environments. We validate the effectiveness of our method on multiple datasets across different platforms, achieving accuracy comparable to state-of-the-art LiDAR-only odometry methods. Notably, in scenarios involving aggressive motion and sparse features, our method outperforms existing solutions.
OTO Planner: An Efficient Only Travelling Once Exploration Planner for Complex and Unknown Environments
Jun 11, 2024



Autonomous exploration in complex and cluttered environments is essential for various applications. However, there are many challenges due to the lack of global heuristic information. Existing exploration methods suffer from the repeated paths and considerable computational resource requirement in large-scale environments. To address the above issues, this letter proposes an efficient exploration planner that reduces repeated paths in complex environments, hence it is called "Only Travelling Once Planner". OTO Planner includes fast frontier updating, viewpoint evaluation and viewpoint refinement. A selective frontier updating mechanism is designed, saving a large amount of computational resources. In addition, a novel viewpoint evaluation system is devised to reduce the repeated paths utilizing the enclosed sub-region detection. Besides, a viewpoint refinement approach is raised to concentrate the redundant viewpoints, leading to smoother paths. We conduct extensive simulation and real-world experiments to validate the proposed method. Compared to the state-of-the-art approach, the proposed method reduces the exploration time and movement distance by 10%-20% and improves the speed of frontier detection by 6-9 times.
MotionBEV: Attention-Aware Online LiDAR Moving Object Segmentation with Bird's Eye View based Appearance and Motion Features
May 12, 2023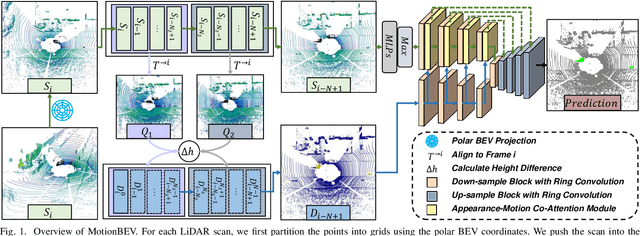
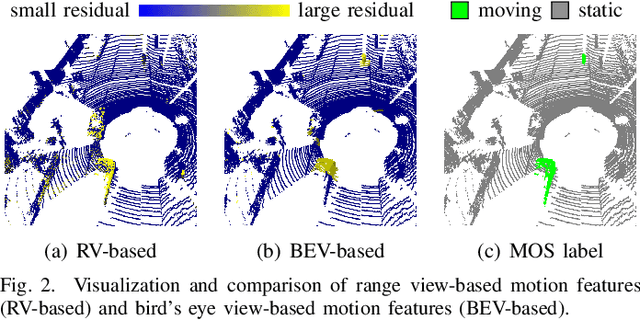
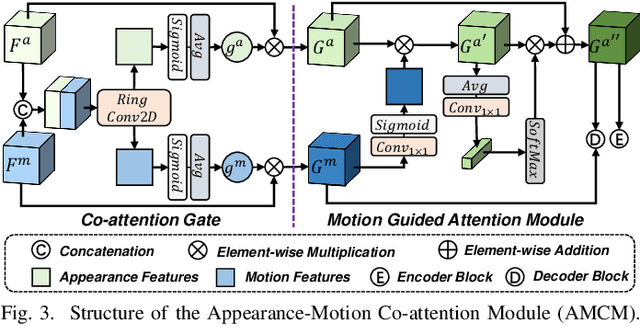
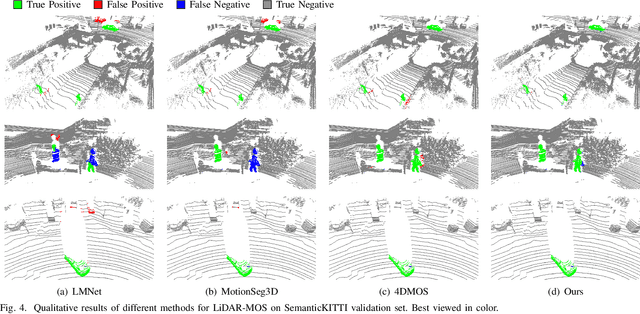
Identifying moving objects is an essential capability for autonomous systems, as it provides critical information for pose estimation, navigation, collision avoidance and static map construction. In this paper, we present MotionBEV, a fast and accurate framework for LiDAR moving object segmentation, which segments moving objects with appearance and motion features in bird's eye view (BEV) domain. Our approach converts 3D LiDAR scans into 2D polar BEV representation to achieve real-time performance. Specifically, we learn appearance features with a simplified PointNet, and compute motion features through the height differences of consecutive frames of point clouds projected onto vertical columns in the polar BEV coordinate system. We employ a dual-branch network bridged by the Appearance-Motion Co-attention Module (AMCM) to adaptively fuse the spatio-temporal information from appearance and motion features. Our approach achieves state-of-the-art performance on the SemanticKITTI-MOS benchmark, with an average inference time of 23ms on an RTX 3090 GPU. Furthermore, to demonstrate the practical effectiveness of our method, we provide a LiDAR-MOS dataset recorded by a solid-state LiDAR, which features non-repetitive scanning patterns and small field of view.