 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotionBEV: Attention-Aware Online LiDAR Moving Object Segmentation with Bird's Eye View based Appearance and Motion Features
Paper and Code
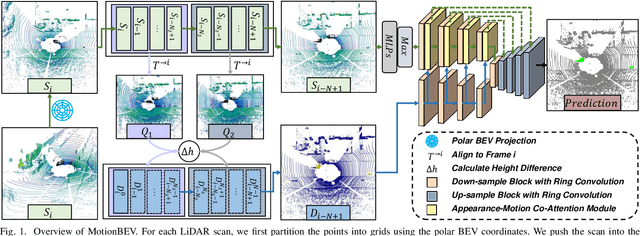
Identifying moving objects is an essential capability for autonomous systems, as it provides critical information for pose estimation, navigation, collision avoidance and static map construction. In this paper, we present MotionBEV, a fast and accurate framework for LiDAR moving object segmentation, which segments moving objects with appearance and motion features in bird's eye view (BEV) domain. Our approach converts 3D LiDAR scans into 2D polar BEV representation to achieve real-time performance. Specifically, we learn appearance features with a simplified PointNet, and compute motion features through the height differences of consecutive frames of point clouds projected onto vertical columns in the polar BEV coordinate system. We employ a dual-branch network bridged by the Appearance-Motion Co-attention Module (AMCM) to adaptively fuse the spatio-temporal information from appearance and motion features. Our approach achieves state-of-the-art performance on the SemanticKITTI-MOS benchmark, with an average inference time of 23ms on an RTX 3090 GPU. Furthermore, to demonstrate the practical effectiveness of our method, we provide a LiDAR-MOS dataset recorded by a solid-state LiDAR, which features non-repetitive scanning patterns and small field of view.