 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIESEF-FusionNet: Spatial Inter-correlation Enhancement and Spatially-Embedded Feature Fusion Network for LiDAR Point Cloud Semantic Segmentation
Nov 11, 2024The ambiguity at the boundaries of different semantic classes in point cloud semantic segmentation often leads to incorrect decisions in intelligent perception systems, such as autonomous driving. Hence, accurate delineation of the boundaries is crucial for improving safety in autonomous driving. A novel spatial inter-correlation enhancement and spatially-embedded feature fusion network (SIESEF-FusionNet) is proposed in this paper, enhancing spatial inter-correlation by combining inverse distance weighting and angular compensation to extract more beneficial spatial information without causing redundancy. Meanwhile, a new spatial adaptive pooling module is also designed, embedding enhanced spatial information into semantic features for strengthening the context-awareness of semantic features. Experimental results demonstrate that 83.7% mIoU and 97.8% OA are achieved by SIESEF-FusionNet on the Toronto3D dataset, with performance superior to other baseline methods. A value of 61.1% mIoU is reached on the semanticKITTI dataset, where a marked improvement in segmentation performance is observed. In addition, the effectiveness and plug-and-play capability of the proposed modules are further verified through ablation studies.
Large Language Model based Agent Framework for Electric Vehicle Charging Behavior Simulation
Aug 03, 2024This paper introduces a new LLM based agent framework for simulating electric vehicle (EV) charging behavior, integrating user preferences, psychological characteristics, and environmental factors to optimize the charging process. The framework comprises several modules, enabling sophisticated, adaptive simulations. Dynamic decision making is supported by continuous reflection and memory updates, ensuring alignment with user expectations and enhanced efficiency. The framework's ability to generate personalized user profiles and real-time decisions offers significant advancements for urban EV charging management. Future work could focus on incorporating more intricate scenarios and expanding data sources to enhance predictive accuracy and practical utility.
Transferring Reinforcement Learning for DC-DC Buck Converter Control via Duty Ratio Mapping: From Simulation to Implementation
Oct 20, 2021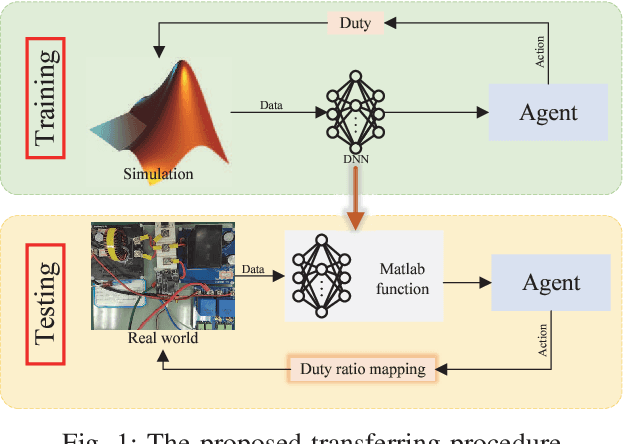
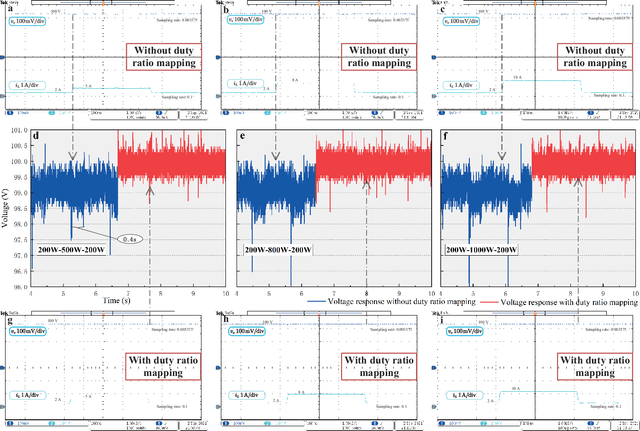
Reinforcement learning (RL) control approach with application into power electronics systems has become an emerging topic whilst the sim-to-real issue remains a challenging problem as very few results can be referred to in the literature. Indeed, due to the inevitable mismatch between simulation models and real-life systems, offline trained RL control strategies may sustain unexpected hurdles in practical implementation during transferring procedure. As the main contribution of this paper, a transferring methodology via a delicately designed duty ratio mapping (DRM) is proposed for a DC-DC buck converter. Then, a detailed sim-to-real process is presented to enable the implementation of a model-free deep reinforcement learning (DRL) controller. The feasibility and effectiveness of the proposed methodology are demonstrated by comparative experimental studies.
An Intelligent Control Strategy for buck DC-DC Converter via Deep Reinforcement Learning
Aug 11, 2020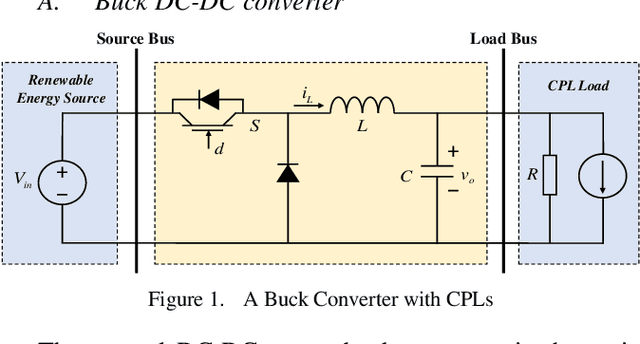
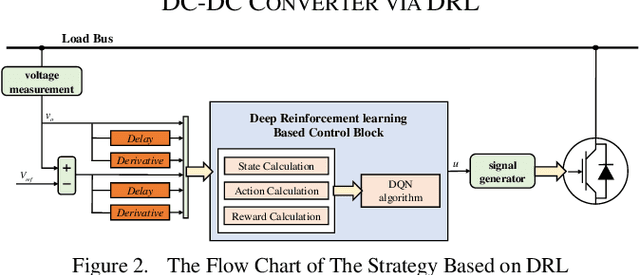
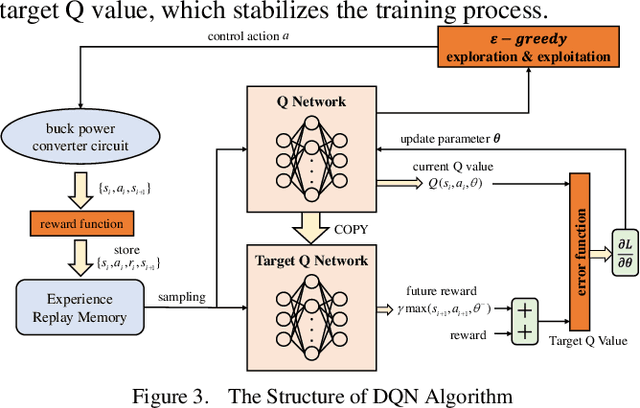
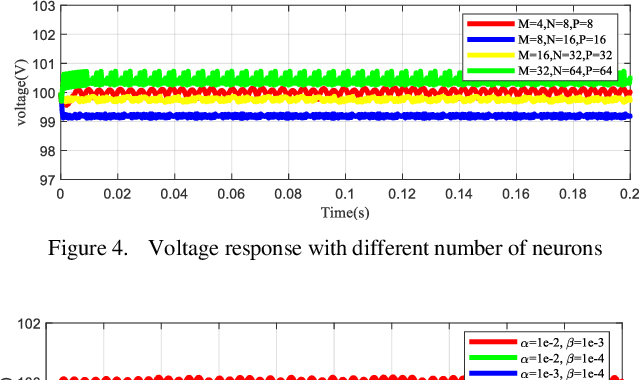
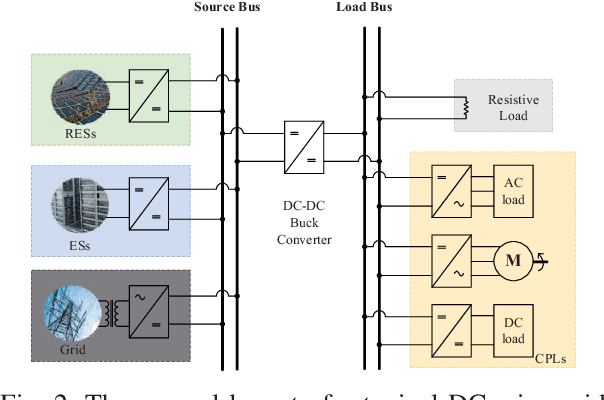
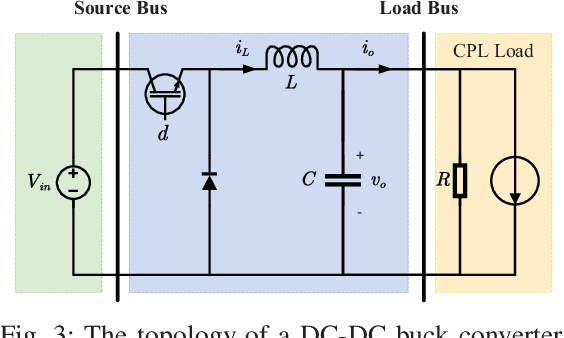
As a typical switching power supply, the DC-DC converter has been widely applied in DC microgrid. Due to the variation of renewable energy generation, research and design of DC-DC converter control algorithm with outstanding dynamic characteristics has significant theoretical and practical application value. To mitigate the bus voltage stability issue in DC microgrid, an innovative intelligent control strategy for buck DC-DC converter with constant power loads (CPLs) via deep reinforcement learning algorithm is constructed for the first time. In this article, a Markov Decision Process (MDP) model and the deep Q network (DQN) algorithm are defined for DC-DC converter. A model-free based deep reinforcement learning (DRL) control strategy is appropriately designed to adjust the agent-environment interaction through the rewards/penalties mechanism towards achieving converge to nominal voltage. The agent makes approximate decisions by extracting the high-dimensional feature of complex power systems without any prior knowledge. Eventually, the simulation comparison results demonstrate that the proposed controller has stronger self-learning and self-optimization capabilities under the different scenarios.