 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudoMapTrainer: Learning Online Mapping without HD Maps
Aug 26, 2025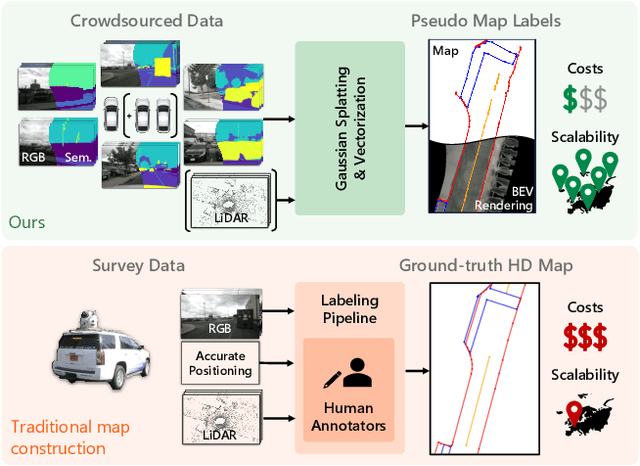
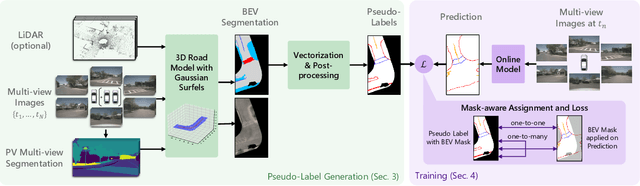
Online mapping models show remarkable results in predicting vectorized maps from multi-view camera images only. However, all existing approaches still rely on ground-truth high-definition maps during training, which are expensive to obtain and often not geographically diverse enough for reliable generalization. In this work, we propose PseudoMapTrainer, a novel approach to online mapping that uses pseudo-labels generated from unlabeled sensor data. We derive those pseudo-labels by reconstructing the road surface from multi-camera imagery using Gaussian splatting and semantics of a pre-trained 2D segmentation network. In addition, we introduce a mask-aware assignment algorithm and loss function to handle partially masked pseudo-labels, allowing for the first time the training of online mapping models without any ground-truth maps. Furthermore, our pseudo-labels can be effectively used to pre-train an online model in a semi-supervised manner to leverage large-scale unlabeled crowdsourced data. The code is available at github.com/boschresearch/PseudoMapTrainer.
Unsupervised Point Cloud Registration with Self-Distillation
Sep 11, 2024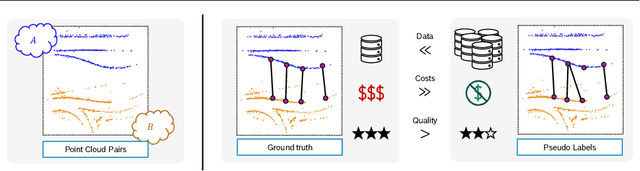
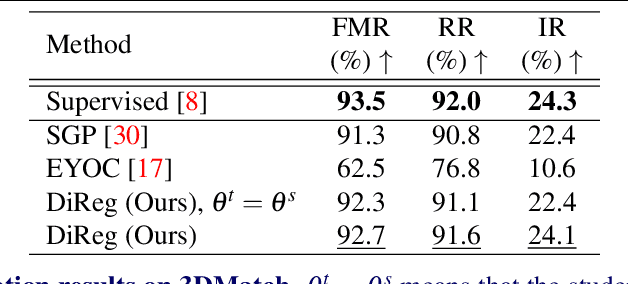
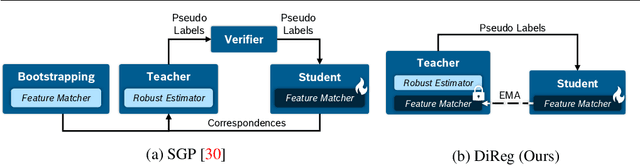
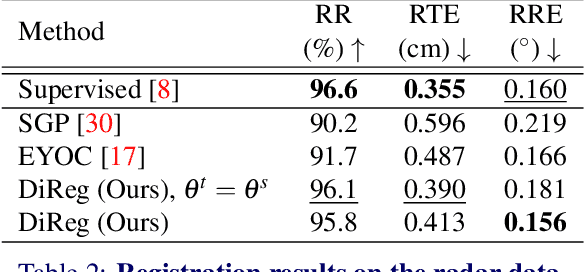
Rigid point cloud registration is a fundamental problem and highly relevant in robotics and autonomous driving. Nowadays deep learning methods can be trained to match a pair of point clouds, given the transformation between them. However, this training is often not scalable due to the high cost of collecting ground truth poses. Therefore, we present a self-distillation approach to learn point cloud registration in an unsupervised fashion. Here, each sample is passed to a teacher network and an augmented view is passed to a student network. The teacher includes a trainable feature extractor and a learning-free robust solver such as RANSAC. The solver forces consistency among correspondences and optimizes for the unsupervised inlier ratio, eliminating the need for ground truth labels. Our approach simplifies the training procedure by removing the need for initial hand-crafted features or consecutive point cloud frames as seen in related methods. We show that our method not only surpasses them on the RGB-D benchmark 3DMatch but also generalizes well to automotive radar, where classical features adopted by others fail. The code is available at https://github.com/boschresearch/direg .
DeepStay: Stay Region Extraction from Location Trajectories using Weak Supervision
Jun 05, 2023Nowadays, mobile devices enable constant tracking of the user's position and location trajectories can be used to infer personal points of interest (POIs) like homes, workplaces, or stores. A common way to extract POIs is to first identify spatio-temporal regions where a user spends a significant amount of time, known as stay regions (SRs). Common approaches to SR extraction are evaluated either solely unsupervised or on a small-scale private dataset, as popular public datasets are unlabeled. Most of these methods rely on hand-crafted features or thresholds and do not learn beyond hyperparameter optimization. Therefore, we propose a weakly and self-supervised transformer-based model called DeepStay, which is trained on location trajectories to predict stay regions. To the best of our knowledge, this is the first approach based on deep learning and the first approach that is evaluated on a public, labeled dataset. Our SR extraction method outperforms state-of-the-art methods. In addition, we conducted a limited experiment on the task of transportation mode detection from GPS trajectories using the same architecture and achieved significantly higher scores than the state-of-the-art. Our code is available at https://github.com/christianll9/deepstay.
Solving the Traveling Salesperson Problem with Precedence Constraints by Deep Reinforcement Learning
Jul 04, 2022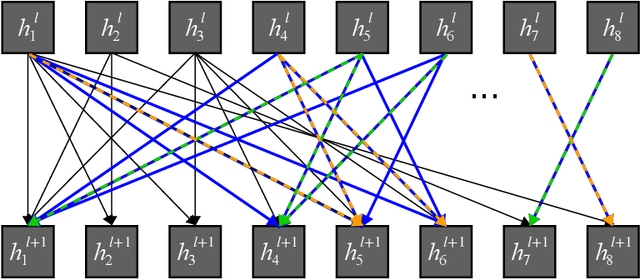
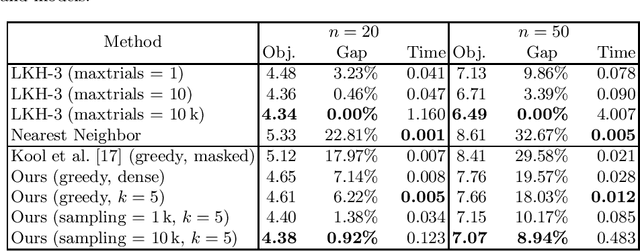
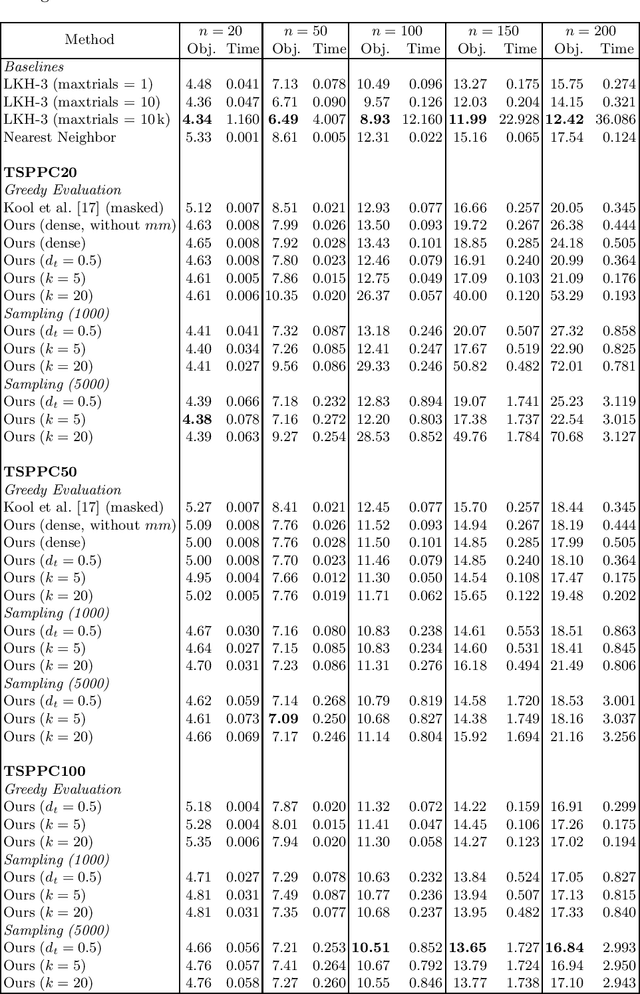
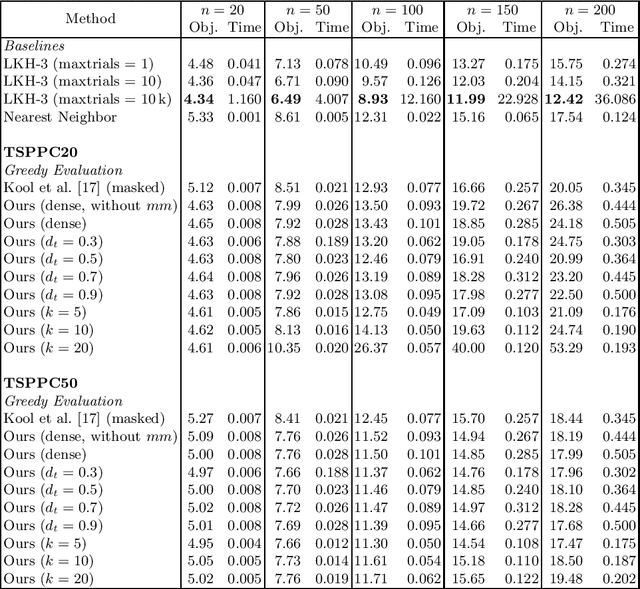
This work presents solutions to the Traveling Salesperson Problem with precedence constraints (TSPPC) using Deep Reinforcement Learning (DRL) by adapting recent approaches that work well for regular TSPs. Common to these approaches is the use of graph models based on multi-head attention (MHA) layers. One idea for solving the pickup and delivery problem (PDP) is using heterogeneous attentions to embed the different possible roles each node can take. In this work, we generalize this concept of heterogeneous attentions to the TSPPC. Furthermore, we adapt recent ideas to sparsify attentions for better scalability. Overall, we contribute to the research community through the application and evaluation of recent DRL methods in solving the TSPPC.