 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning from Noisy Labels via Self-Taught On-the-Fly Meta Loss Rescaling
Dec 17, 2024



Correct labels are indispensable for training effective machine learning models. However, creating high-quality labels is expensive, and even professionally labeled data contains errors and ambiguities. Filtering and denoising can be applied to curate labeled data prior to training, at the cost of additional processing and loss of information. An alternative is on-the-fly sample reweighting during the training process to decrease the negative impact of incorrect or ambiguous labels, but this typically requires clean seed data. In this work we propose unsupervised on-the-fly meta loss rescaling to reweight training samples. Crucially, we rely only on features provided by the model being trained, to learn a rescaling function in real time without knowledge of the true clean data distribution. We achieve this via a novel meta learning setup that samples validation data for the meta update directly from the noisy training corpus by employing the rescaling function being trained. Our proposed method consistently improves performance across various NLP tasks with minimal computational overhead. Further, we are among the first to attempt on-the-fly training data reweighting on the challenging task of dialogue modeling, where noisy and ambiguous labels are common. Our strategy is robust in the face of noisy and clean data, handles class imbalance, and prevents overfitting to noisy labels. Our self-taught loss rescaling improves as the model trains, showing the ability to keep learning from the model's own signals. As training progresses, the impact of correctly labeled data is scaled up, while the impact of wrongly labeled data is suppressed.
Infusing Emotions into Task-oriented Dialogue Systems: Understanding, Management, and Generation
Aug 05, 2024
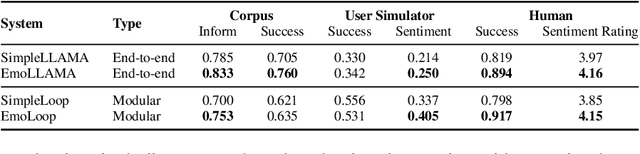
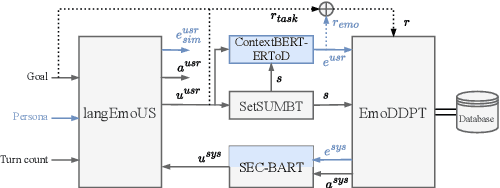
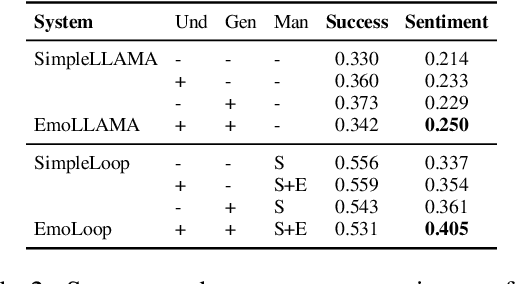
Emotions are indispensable in human communication, but are often overlooked in task-oriented dialogue (ToD) modelling, where the task success is the primary focus. While existing works have explored user emotions or similar concepts in some ToD tasks, none has so far included emotion modelling into a fully-fledged ToD system nor conducted interaction with human or simulated users. In this work, we incorporate emotion into the complete ToD processing loop, involving understanding, management, and generation. To this end, we extend the EmoWOZ dataset (Feng et al., 2022) with system affective behaviour labels. Through interactive experimentation involving both simulated and human users, we demonstrate that our proposed framework significantly enhances the user's emotional experience as well as the task success.
CAMELL: Confidence-based Acquisition Model for Efficient Self-supervised Active Learning with Label Validation
Oct 13, 2023Supervised neural approaches are hindered by their dependence on large, meticulously annotated datasets, a requirement that is particularly cumbersome for sequential tasks. The quality of annotations tends to deteriorate with the transition from expert-based to crowd-sourced labelling. To address these challenges, we present \textbf{CAMELL} (Confidence-based Acquisition Model for Efficient self-supervised active Learning with Label validation), a pool-based active learning framework tailored for sequential multi-output problems. CAMELL possesses three core features: (1) it requires expert annotators to label only a fraction of a chosen sequence, (2) it facilitates self-supervision for the remainder of the sequence, and (3) it employs a label validation mechanism to prevent erroneous labels from contaminating the dataset and harming model performance. We evaluate CAMELL on sequential tasks, with a special emphasis on dialogue belief tracking, a task plagued by the constraints of limited and noisy datasets. Our experiments demonstrate that CAMELL outperforms the baselines in terms of efficiency. Furthermore, the data corrections suggested by our method contribute to an overall improvement in the quality of the resulting datasets.
From Chatter to Matter: Addressing Critical Steps of Emotion Recognition Learning in Task-oriented Dialogue
Aug 24, 2023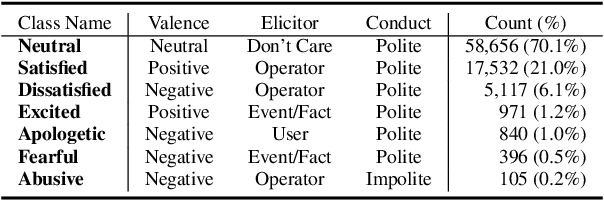
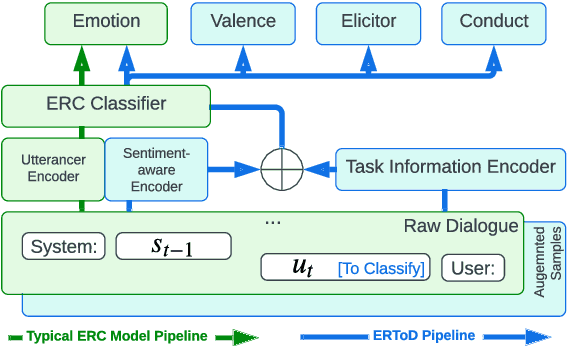
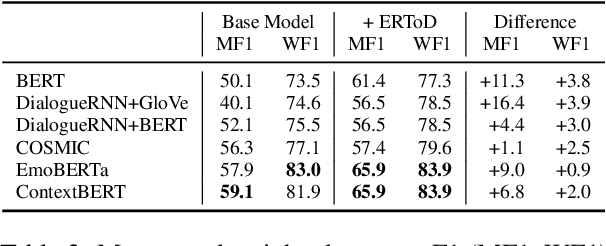
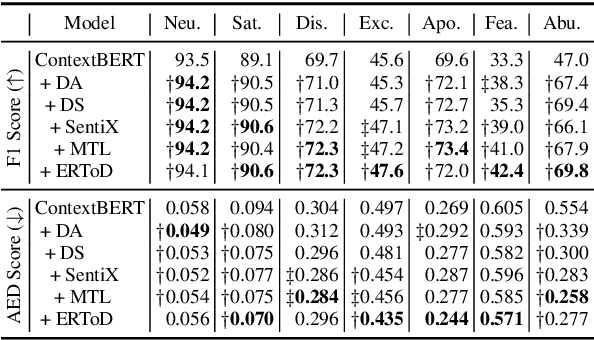
Emotion recognition in conversations (ERC) is a crucial task for building human-like conversational agents. While substantial efforts have been devoted to ERC for chit-chat dialogues, the task-oriented counterpart is largely left unattended. Directly applying chit-chat ERC models to task-oriented dialogues (ToDs) results in suboptimal performance as these models overlook key features such as the correlation between emotions and task completion in ToDs. In this paper, we propose a framework that turns a chit-chat ERC model into a task-oriented one, addressing three critical aspects: data, features and objective. First, we devise two ways of augmenting rare emotions to improve ERC performance. Second, we use dialogue states as auxiliary features to incorporate key information from the goal of the user. Lastly, we leverage a multi-aspect emotion definition in ToDs to devise a multi-task learning objective and a novel emotion-distance weighted loss function. Our framework yields significant improvements for a range of chit-chat ERC models on EmoWOZ, a large-scale dataset for user emotion in ToDs. We further investigate the generalisability of the best resulting model to predict user satisfaction in different ToD datasets. A comparison with supervised baselines shows a strong zero-shot capability, highlighting the potential usage of our framework in wider scenarios.
EmoUS: Simulating User Emotions in Task-Oriented Dialogues
Jun 02, 2023
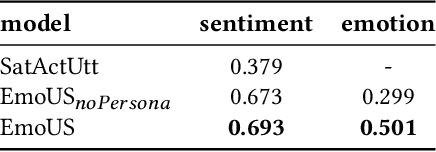

Existing user simulators (USs) for task-oriented dialogue systems only model user behaviour on semantic and natural language levels without considering the user persona and emotions. Optimising dialogue systems with generic user policies, which cannot model diverse user behaviour driven by different emotional states, may result in a high drop-off rate when deployed in the real world. Thus, we present EmoUS, a user simulator that learns to simulate user emotions alongside user behaviour. EmoUS generates user emotions, semantic actions, and natural language responses based on the user goal, the dialogue history, and the user persona. By analysing what kind of system behaviour elicits what kind of user emotions, we show that EmoUS can be used as a probe to evaluate a variety of dialogue systems and in particular their effect on the user's emotional state. Developing such methods is important in the age of large language model chat-bots and rising ethical concerns.
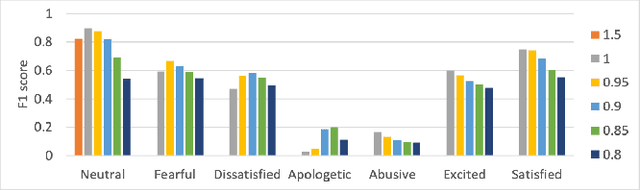
ChatGPT for Zero-shot Dialogue State Tracking: A Solution or an Opportunity?
Jun 02, 2023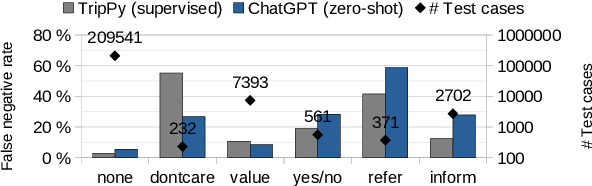
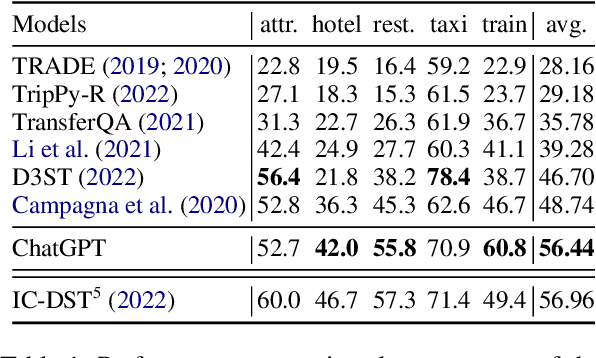
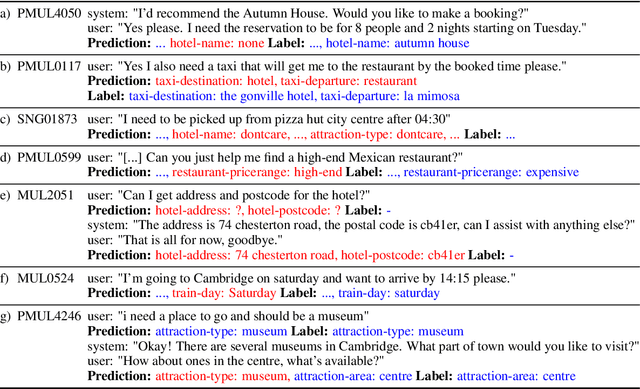
Recent research on dialogue state tracking (DST) focuses on methods that allow few- and zero-shot transfer to new domains or schemas. However, performance gains heavily depend on aggressive data augmentation and fine-tuning of ever larger language model based architectures. In contrast, general purpose language models, trained on large amounts of diverse data, hold the promise of solving any kind of task without task-specific training. We present preliminary experimental results on the ChatGPT research preview, showing that ChatGPT achieves state-of-the-art performance in zero-shot DST. Despite our findings, we argue that properties inherent to general purpose models limit their ability to replace specialized systems. We further theorize that the in-context learning capabilities of such models will likely become powerful tools to support the development of dedicated and dynamic dialogue state trackers.
ConvLab-3: A Flexible Dialogue System Toolkit Based on a Unified Data Format
Nov 30, 2022Diverse data formats and ontologies of task-oriented dialogue (TOD) datasets hinder us from developing general dialogue models that perform well on many datasets and studying knowledge transfer between datasets. To address this issue, we present ConvLab-3, a flexible dialogue system toolkit based on a unified TOD data format. In ConvLab-3, different datasets are transformed into one unified format and loaded by models in the same way. As a result, the cost of adapting a new model or dataset is significantly reduced. Compared to the previous releases of ConvLab (Lee et al., 2019b; Zhu et al., 2020b), ConvLab-3 allows developing dialogue systems with much more datasets and enhances the utility of the reinforcement learning (RL) toolkit for dialogue policies. To showcase the use of ConvLab-3 and inspire future work, we present a comprehensive study with various settings. We show the benefit of pre-training on other datasets for few-shot fine-tuning and RL, and encourage evaluating policy with diverse user simulators.
Dialogue Evaluation with Offline Reinforcement Learning
Sep 02, 2022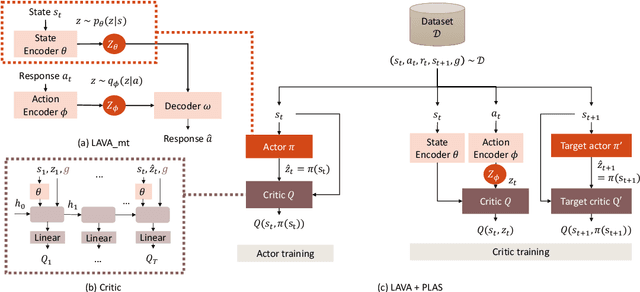
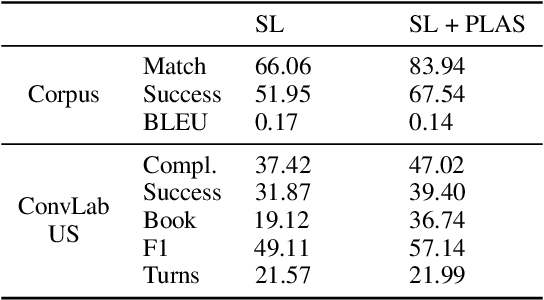
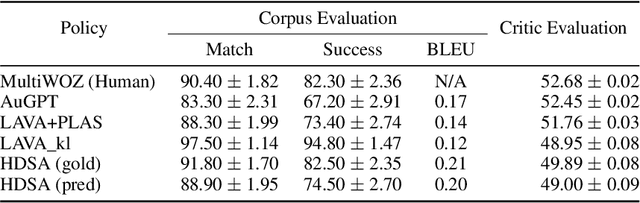

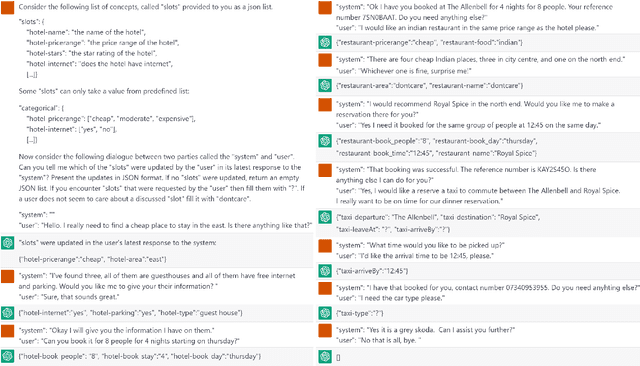
Task-oriented dialogue systems aim to fulfill user goals through natural language interactions. They are ideally evaluated with human users, which however is unattainable to do at every iteration of the development phase. Simulated users could be an alternative, however their development is nontrivial. Therefore, researchers resort to offline metrics on existing human-human corpora, which are more practical and easily reproducible. They are unfortunately limited in reflecting real performance of dialogue systems. BLEU for instance is poorly correlated with human judgment, and existing corpus-based metrics such as success rate overlook dialogue context mismatches. There is still a need for a reliable metric for task-oriented systems with good generalization and strong correlation with human judgements. In this paper, we propose the use of offline reinforcement learning for dialogue evaluation based on a static corpus. Such an evaluator is typically called a critic and utilized for policy optimization. We go one step further and show that offline RL critics can be trained on a static corpus for any dialogue system as external evaluators, allowing dialogue performance comparisons across various types of systems. This approach has the benefit of being corpus- and model-independent, while attaining strong correlation with human judgements, which we confirm via an interactive user trial.
GenTUS: Simulating User Behaviour and Language in Task-oriented Dialogues with Generative Transformers
Aug 23, 2022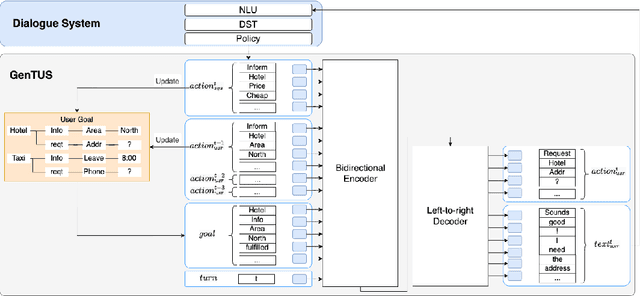
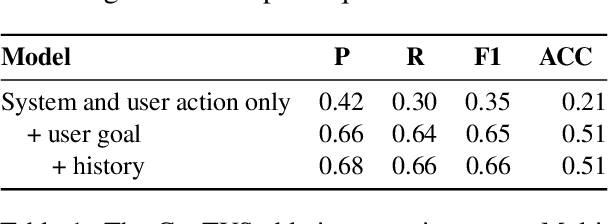
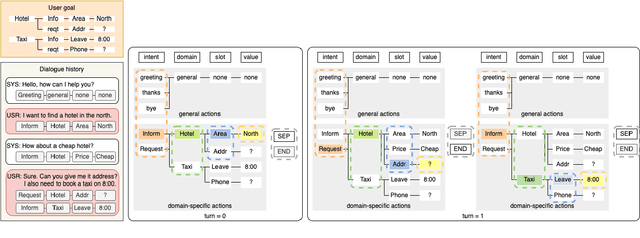
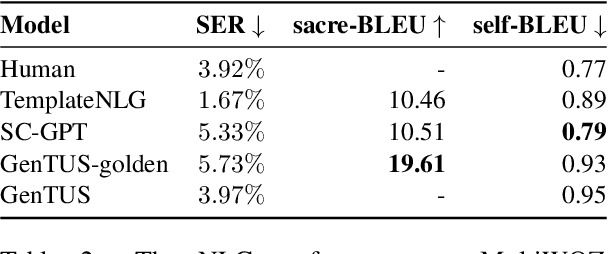
User simulators (USs) are commonly used to train task-oriented dialogue systems (DSs) via reinforcement learning. The interactions often take place on semantic level for efficiency, but there is still a gap from semantic actions to natural language, which causes a mismatch between training and deployment environment. Incorporating a natural language generation (NLG) module with USs during training can partly deal with this problem. However, since the policy and NLG of USs are optimised separately, these simulated user utterances may not be natural enough in a given context. In this work, we propose a generative transformer-based user simulator (GenTUS). GenTUS consists of an encoder-decoder structure, which means it can optimise both the user policy and natural language generation jointly. GenTUS generates both semantic actions and natural language utterances, preserving interpretability and enhancing language variation. In addition, by representing the inputs and outputs as word sequences and by using a large pre-trained language model we can achieve generalisability in feature representation. We evaluate GenTUS with automatic metrics and human evaluation. Our results show that GenTUS generates more natural language and is able to transfer to an unseen ontology in a zero-shot fashion. In addition, its behaviour can be further shaped with reinforcement learning opening the door to training specialised user simulators.
Dynamic Dialogue Policy Transformer for Continual Reinforcement Learning
Apr 12, 2022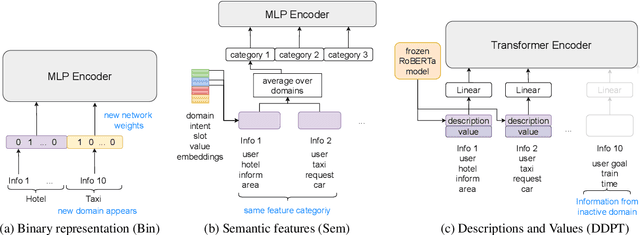
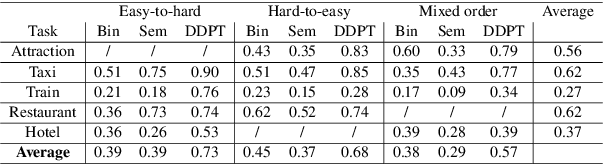
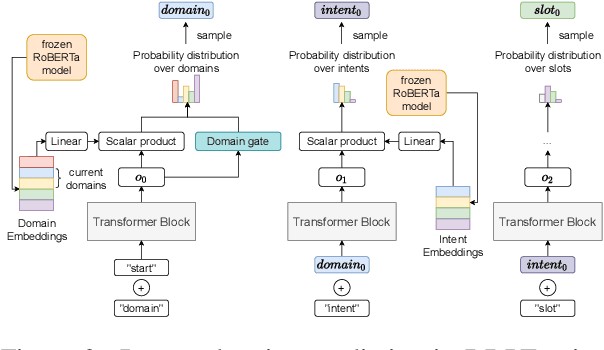
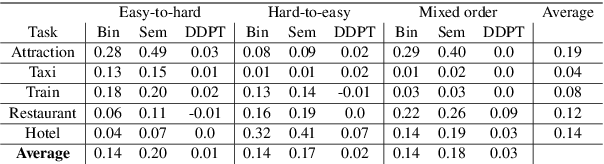
Continual learning is one of the key components of human learning and a necessary requirement of artificial intelligence. As dialogue can potentially span infinitely many topics and tasks, a task-oriented dialogue system must have the capability to continually learn, dynamically adapting to new challenges while preserving the knowledge it already acquired. Despite the importance, continual reinforcement learning of the dialogue policy has remained largely unaddressed. The lack of a framework with training protocols, baseline models and suitable metrics, has so far hindered research in this direction. In this work we fill precisely this gap, enabling research in dialogue policy optimisation to go from static to dynamic learning. We provide a continual learning algorithm, baseline architectures and metrics for assessing continual learning models. Moreover, we propose the dynamic dialogue policy transformer (DDPT), a novel dynamic architecture that can integrate new knowledge seamlessly, is capable of handling large state spaces and obtains significant zero-shot performance when being exposed to unseen domains, without any growth in network parameter size.