 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAudiobox: Unified Audio Generation with Natural Language Prompts
Dec 25, 2023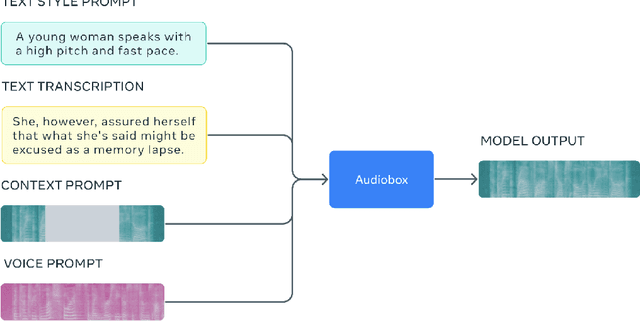

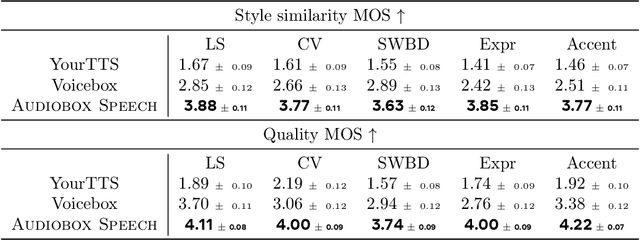
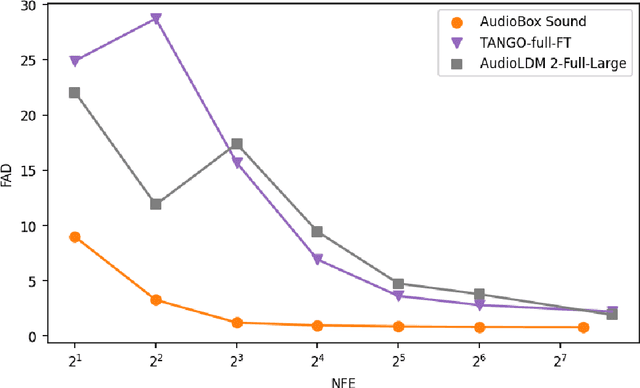
Audio is an essential part of our life, but creating it often requires expertise and is time-consuming. Research communities have made great progress over the past year advancing the performance of large scale audio generative models for a single modality (speech, sound, or music) through adopting more powerful generative models and scaling data. However, these models lack controllability in several aspects: speech generation models cannot synthesize novel styles based on text description and are limited on domain coverage such as outdoor environments; sound generation models only provide coarse-grained control based on descriptions like "a person speaking" and would only generate mumbling human voices. This paper presents Audiobox, a unified model based on flow-matching that is capable of generating various audio modalities. We design description-based and example-based prompting to enhance controllability and unify speech and sound generation paradigms. We allow transcript, vocal, and other audio styles to be controlled independently when generating speech. To improve model generalization with limited labels, we adapt a self-supervised infilling objective to pre-train on large quantities of unlabeled audio. Audiobox sets new benchmarks on speech and sound generation (0.745 similarity on Librispeech for zero-shot TTS; 0.77 FAD on AudioCaps for text-to-sound) and unlocks new methods for generating audio with novel vocal and acoustic styles. We further integrate Bespoke Solvers, which speeds up generation by over 25 times compared to the default ODE solver for flow-matching, without loss of performance on several tasks. Our demo is available at https://audiobox.metademolab.com/
Digital Twin in Safety-Critical Robotics Applications: Opportunities and Challenges
Sep 26, 2022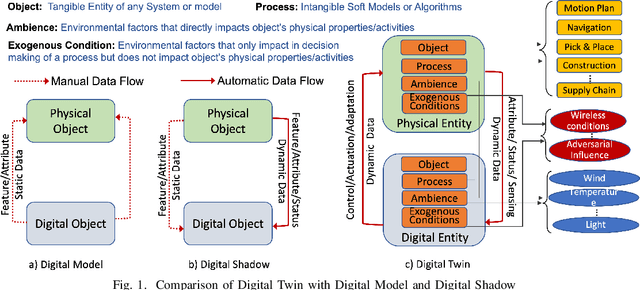
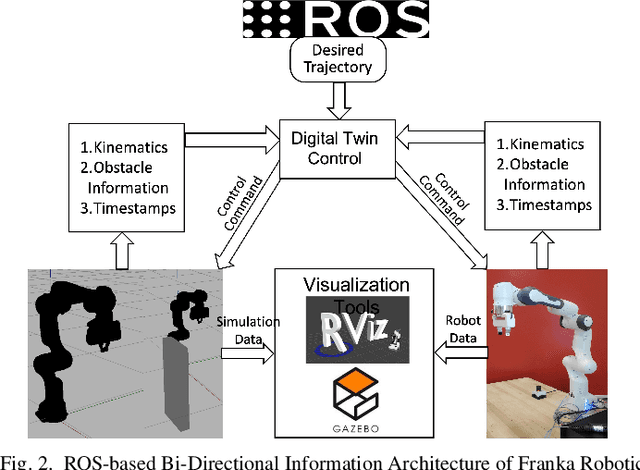
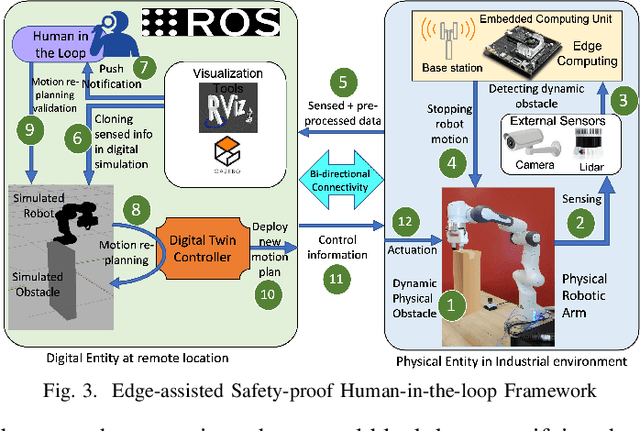
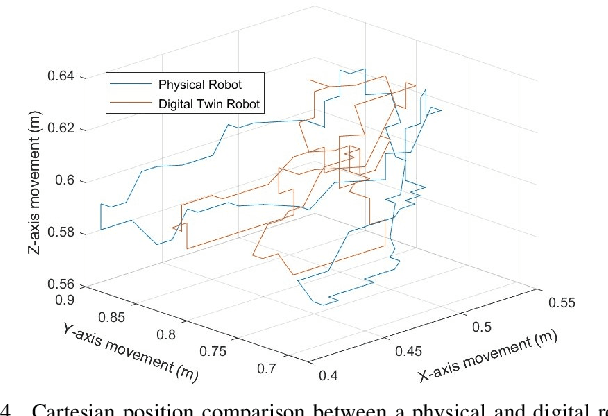
Digital Twin technology is being envisioned to be an integral part of the industrial evolution in modern generation. With the rapid advancement in the Internet-of-Things (IoT) technology and increasing trend of automation, integration between the virtual and the physical world is now realizable to produce practical digital twins. However, the existing definitions of digital twin is incomplete and sometimes ambiguous. Herein, we conduct historical review and analyze the modern generic view of digital twin to create its new extended definition. We also review and discuss the existing work in digital twin in safety-critical robotics applications. Especially, the usage of digital twin in industrial applications necessitates autonomous and remote operations due to environmental challenges. However, the uncertainties in the environment may need close monitoring and quick adaptation of the robots which need to be safety-proof and cost effective. We demonstrate a case study on developing a framework for safety-critical robotic arm applications and present the system performance to show its advantages, and discuss the challenges and scopes ahead.