 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin in Safety-Critical Robotics Applications: Opportunities and Challenges
Sep 26, 2022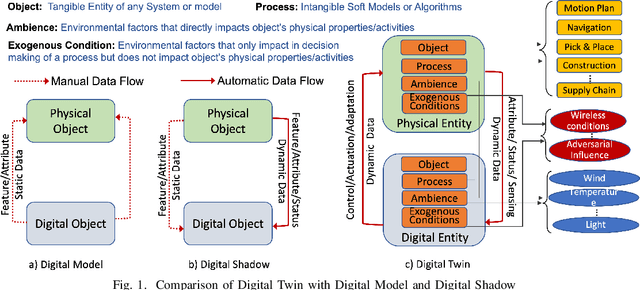
Digital Twin technology is being envisioned to be an integral part of the industrial evolution in modern generation. With the rapid advancement in the Internet-of-Things (IoT) technology and increasing trend of automation, integration between the virtual and the physical world is now realizable to produce practical digital twins. However, the existing definitions of digital twin is incomplete and sometimes ambiguous. Herein, we conduct historical review and analyze the modern generic view of digital twin to create its new extended definition. We also review and discuss the existing work in digital twin in safety-critical robotics applications. Especially, the usage of digital twin in industrial applications necessitates autonomous and remote operations due to environmental challenges. However, the uncertainties in the environment may need close monitoring and quick adaptation of the robots which need to be safety-proof and cost effective. We demonstrate a case study on developing a framework for safety-critical robotic arm applications and present the system performance to show its advantages, and discuss the challenges and scopes ahead.
Edge-assisted Collaborative Digital Twin for Safety-Critical Robotics in Industrial IoT
Sep 26, 2022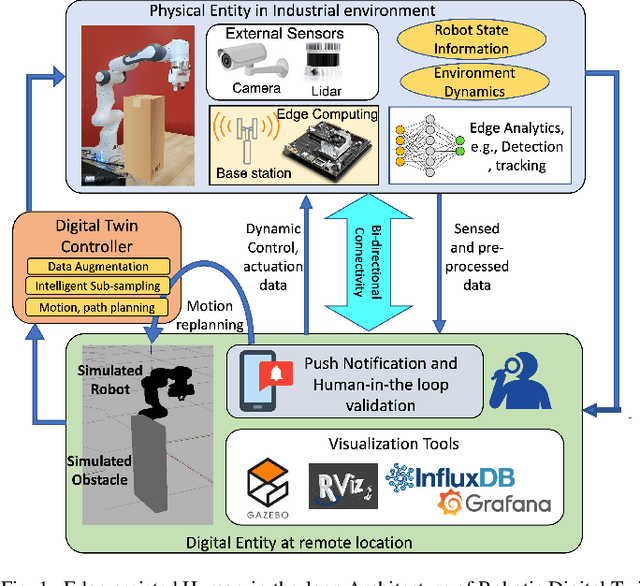
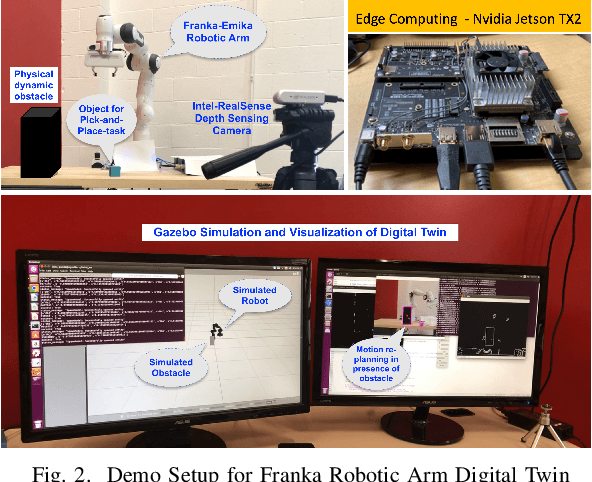
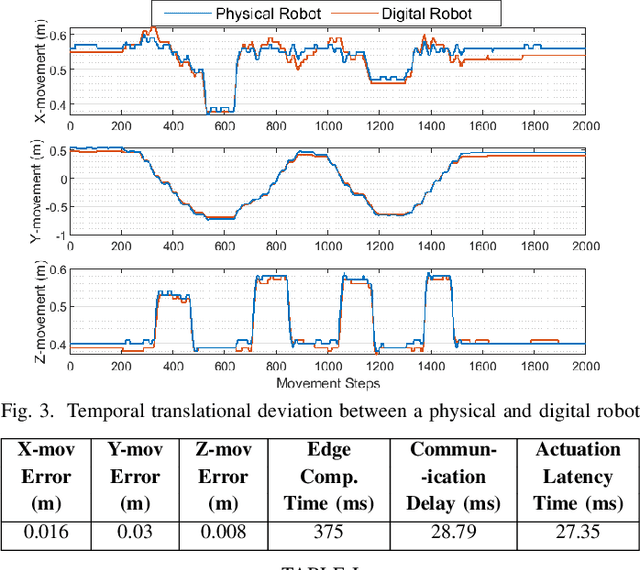
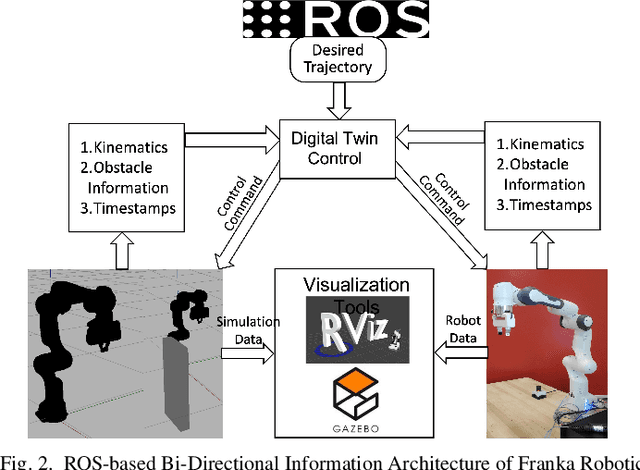
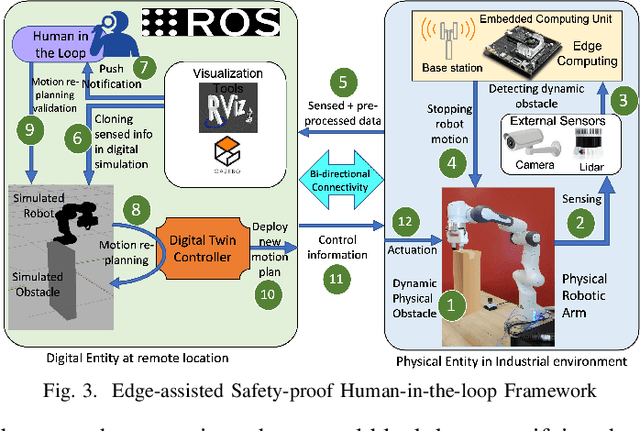
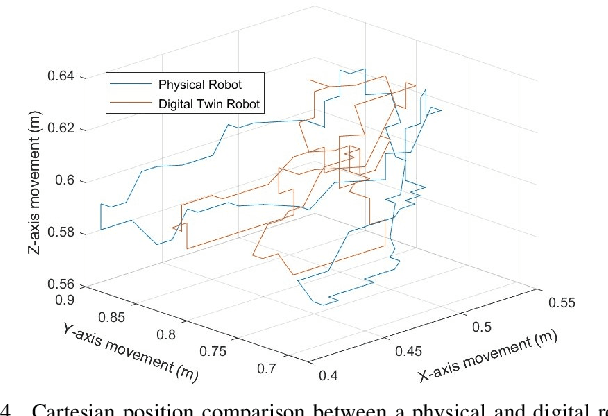
Digital Twin technology is playing a pivotal role in the modern industrial evolution. Especially, with the technological progress in the Internet-of-Things (IoT) and the increasing trend in autonomy, multi-sensor equipped robotics can create practical digital twin, which is particularly useful in the industrial applications for operations, maintenance and safety. Herein, we demonstrate a real-world digital twin of a safety-critical robotics applications with a Franka-Emika-Panda robotic arm. We develop and showcase an edge-assisted collaborative digital twin for dynamic obstacle avoidance which can be useful in real-time adaptation of the robots while operating in the uncertain and dynamic environments in industrial IoT.