 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lightweight Large Vision-language Model for Multimodal Medical Images
Apr 08, 2025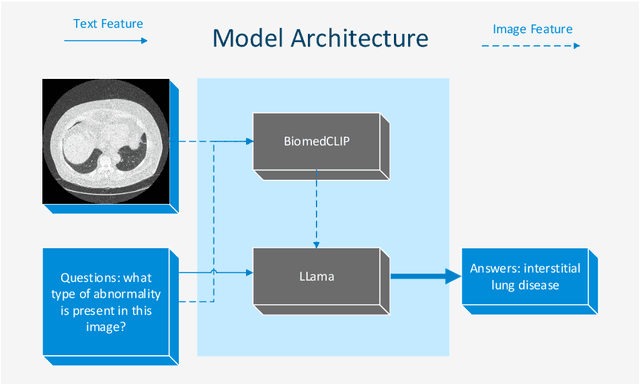

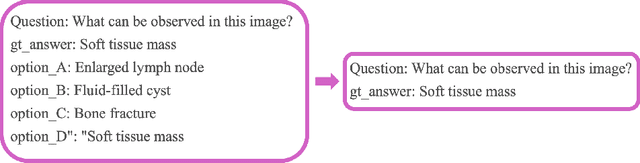
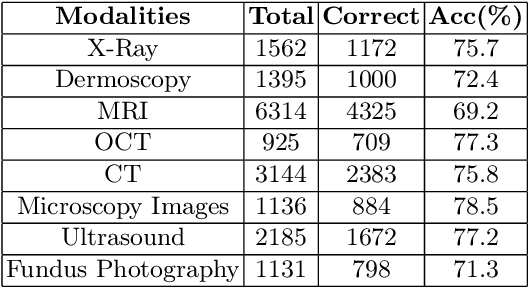
Medical Visual Question Answering (VQA) enhances clinical decision-making by enabling systems to interpret medical images and answer clinical queries. However, developing efficient, high-performance VQA models is challenging due to the complexity of medical imagery and diverse modalities. In this paper, we introduce a lightweight, multimodal VQA model integrating BiomedCLIP for image feature extraction and LLaMA-3 for text processing. Designed for medical VQA tasks, our model achieves state-of-the-art performance on the OmniMedVQA dataset. With approximately 8 billion parameters, it requires only two NVIDIA 40 GB A100 GPUs, demonstrating superior efficiency over larger models. Our results show 73.4% accuracy for open-end questions, surpassing existing models and validating its potential for real-world medical applications. Key contributions include a specialized multimodal VQA model, a resource-efficient architecture, and strong performance in answering open-ended clinical questions.
Linked Adapters: Linking Past and Future to Present for Effective Continual Learning
Dec 14, 2024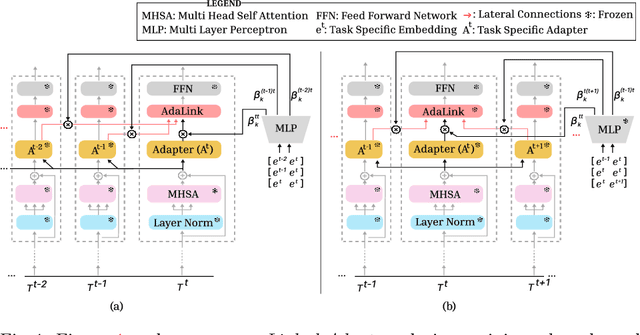
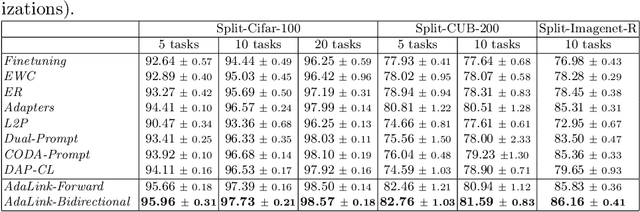

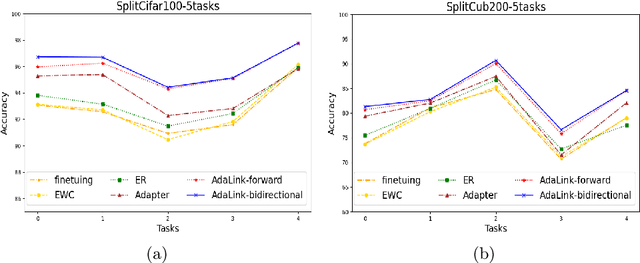
Continual learning allows the system to learn and adapt to new tasks while retaining the knowledge acquired from previous tasks. However, deep learning models suffer from catastrophic forgetting of knowledge learned from earlier tasks while learning a new task. Moreover, retraining large models like transformers from scratch for every new task is costly. An effective approach to address continual learning is to use a large pre-trained model with task-specific adapters to adapt to the new tasks. Though this approach can mitigate catastrophic forgetting, they fail to transfer knowledge across tasks as each task is learning adapters separately. To address this, we propose a novel approach Linked Adapters that allows knowledge transfer through a weighted attention mechanism to other task-specific adapters. Linked adapters use a multi-layer perceptron (MLP) to model the attention weights, which overcomes the challenge of backward knowledge transfer in continual learning in addition to modeling the forward knowledge transfer. During inference, our proposed approach effectively leverages knowledge transfer through MLP-based attention weights across all the lateral task adapters. Through numerous experiments conducted on diverse image classification datasets, we effectively demonstrated the improvement in performance on the continual learning tasks using Linked Adapters.
Towards self-attention based visual navigation in the real world
Sep 19, 2022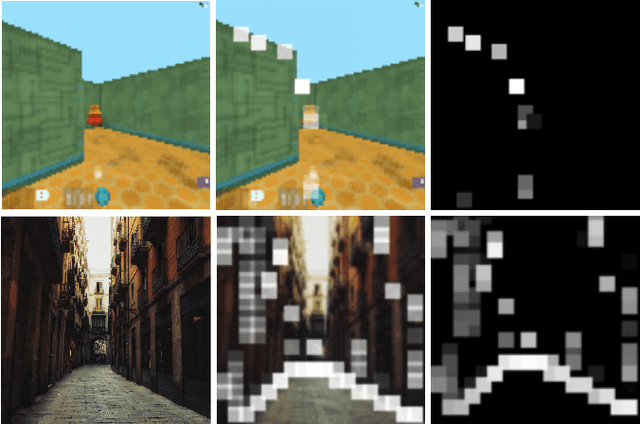

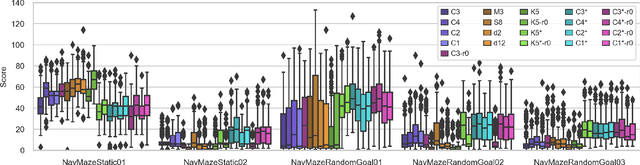
Vision guided navigation requires processing complex visual information to inform task-orientated decisions. Applications include autonomous robots, self-driving cars, and assistive vision for humans. A key element is the extraction and selection of relevant features in pixel space upon which to base action choices, for which Machine Learning techniques are well suited. However, Deep Reinforcement Learning agents trained in simulation often exhibit unsatisfactory results when deployed in the real-world due to perceptual differences known as the $\textit{reality gap}$. An approach that is yet to be explored to bridge this gap is self-attention. In this paper we (1) perform a systematic exploration of the hyperparameter space for self-attention based navigation of 3D environments and qualitatively appraise behaviour observed from different hyperparameter sets, including their ability to generalise; (2) present strategies to improve the agents' generalisation abilities and navigation behaviour; and (3) show how models trained in simulation are capable of processing real world images meaningfully in real time. To our knowledge, this is the first demonstration of a self-attention based agent successfully trained in navigating a 3D action space, using less than 4000 parameters.
Adapting a General Purpose Social Robot for Paediatric Rehabilitation through In-situ Design
Mar 08, 2018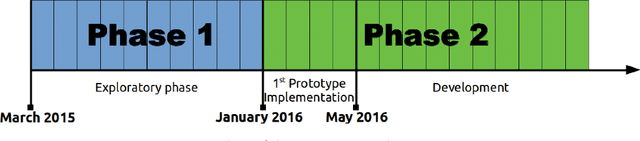
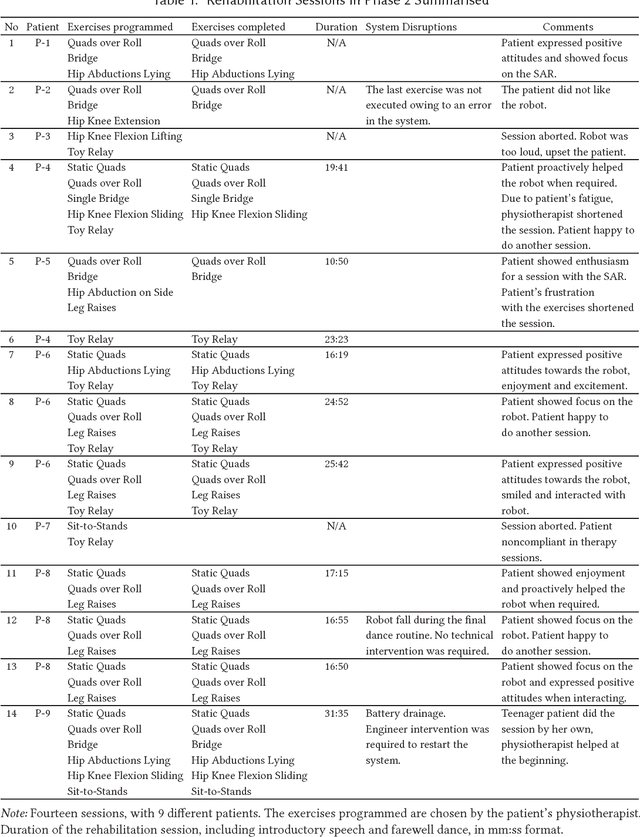
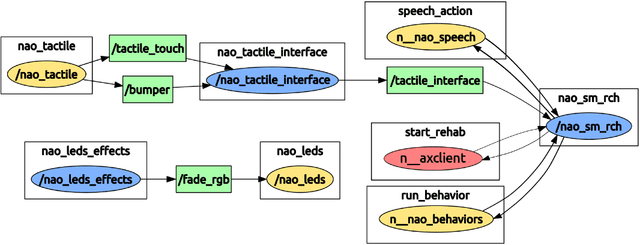
Socially Assistive Robots (SARs) offer great promise for improving outcomes in paediatric rehabilitation. However, the design of software and interactive capabilities for SARs must be carefully considered in the context of their intended clinical use. While previous work has explored specific roles and functionalities to support paediatric rehabilitation, few have considered the design of such capabilities in the context of ongoing clinical deployment. In this paper we present a two-phase In-situ design process for SARs in health care, emphasising stakeholder engagement and on-site development. We explore this in the context of developing the humanoid social robot NAO as a socially assistive rehabilitation aid for children with cerebral palsy. We present and evaluate our design process, outcomes achieved, and preliminary results from ongoing clinical testing with 9 patients and 5 therapists over 14 sessions. We argue that our in-situ Design methodology has been central to the rapid and successful deployment of our system.