 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdapting a General Purpose Social Robot for Paediatric Rehabilitation through In-situ Design
Mar 08, 2018
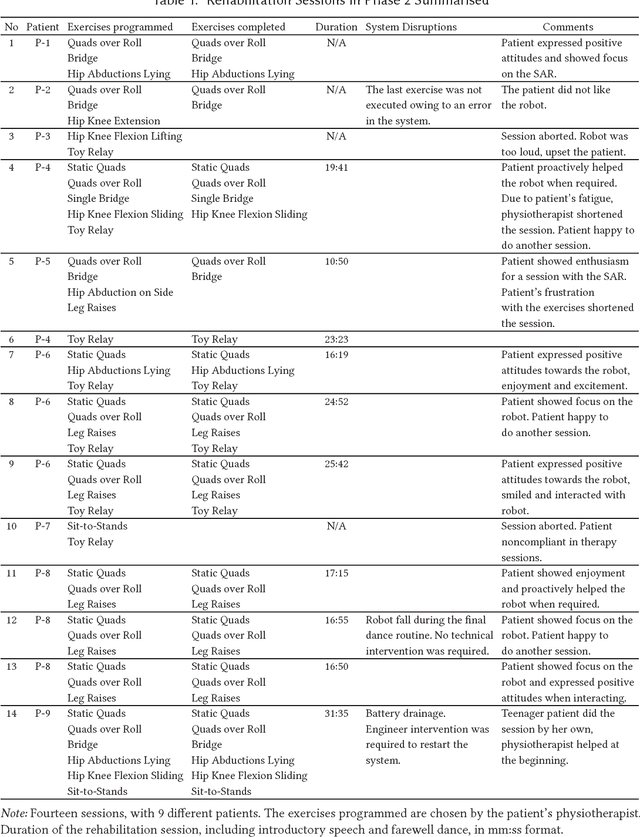
Socially Assistive Robots (SARs) offer great promise for improving outcomes in paediatric rehabilitation. However, the design of software and interactive capabilities for SARs must be carefully considered in the context of their intended clinical use. While previous work has explored specific roles and functionalities to support paediatric rehabilitation, few have considered the design of such capabilities in the context of ongoing clinical deployment. In this paper we present a two-phase In-situ design process for SARs in health care, emphasising stakeholder engagement and on-site development. We explore this in the context of developing the humanoid social robot NAO as a socially assistive rehabilitation aid for children with cerebral palsy. We present and evaluate our design process, outcomes achieved, and preliminary results from ongoing clinical testing with 9 patients and 5 therapists over 14 sessions. We argue that our in-situ Design methodology has been central to the rapid and successful deployment of our system.