 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Rapid Review of Clustering Algorithms
Jan 14, 2024Clustering algorithms aim to organize data into groups or clusters based on the inherent patterns and similarities within the data. They play an important role in today's life, such as in marketing and e-commerce, healthcare, data organization and analysis, and social media. Numerous clustering algorithms exist, with ongoing developments introducing new ones. Each algorithm possesses its own set of strengths and weaknesses, and as of now, there is no universally applicable algorithm for all tasks. In this work, we analyzed existing clustering algorithms and classify mainstream algorithms across five different dimensions: underlying principles and characteristics, data point assignment to clusters, dataset capacity, predefined cluster numbers and application area. This classification facilitates researchers in understanding clustering algorithms from various perspectives and helps them identify algorithms suitable for solving specific tasks. Finally, we discussed the current trends and potential future directions in clustering algorithms. We also identified and discussed open challenges and unresolved issues in the field.
Towards self-attention based visual navigation in the real world
Sep 19, 2022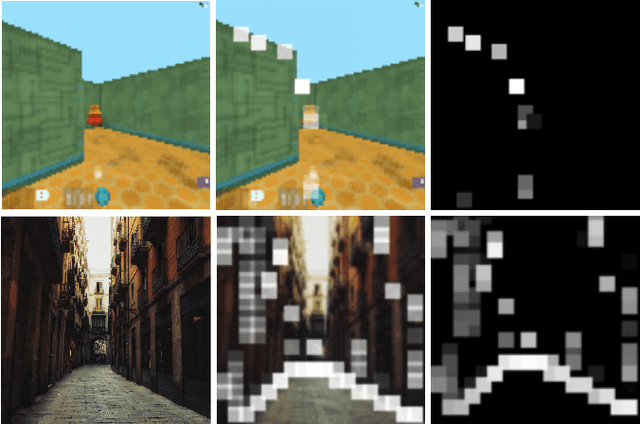

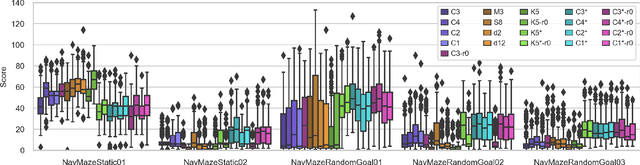
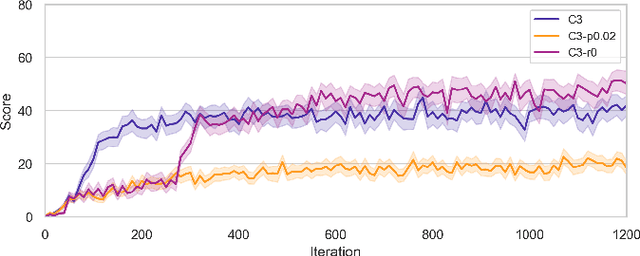
Vision guided navigation requires processing complex visual information to inform task-orientated decisions. Applications include autonomous robots, self-driving cars, and assistive vision for humans. A key element is the extraction and selection of relevant features in pixel space upon which to base action choices, for which Machine Learning techniques are well suited. However, Deep Reinforcement Learning agents trained in simulation often exhibit unsatisfactory results when deployed in the real-world due to perceptual differences known as the $\textit{reality gap}$. An approach that is yet to be explored to bridge this gap is self-attention. In this paper we (1) perform a systematic exploration of the hyperparameter space for self-attention based navigation of 3D environments and qualitatively appraise behaviour observed from different hyperparameter sets, including their ability to generalise; (2) present strategies to improve the agents' generalisation abilities and navigation behaviour; and (3) show how models trained in simulation are capable of processing real world images meaningfully in real time. To our knowledge, this is the first demonstration of a self-attention based agent successfully trained in navigating a 3D action space, using less than 4000 parameters.
Super-Resolving Beyond Satellite Hardware Using Realistically Degraded Images
Mar 10, 2021

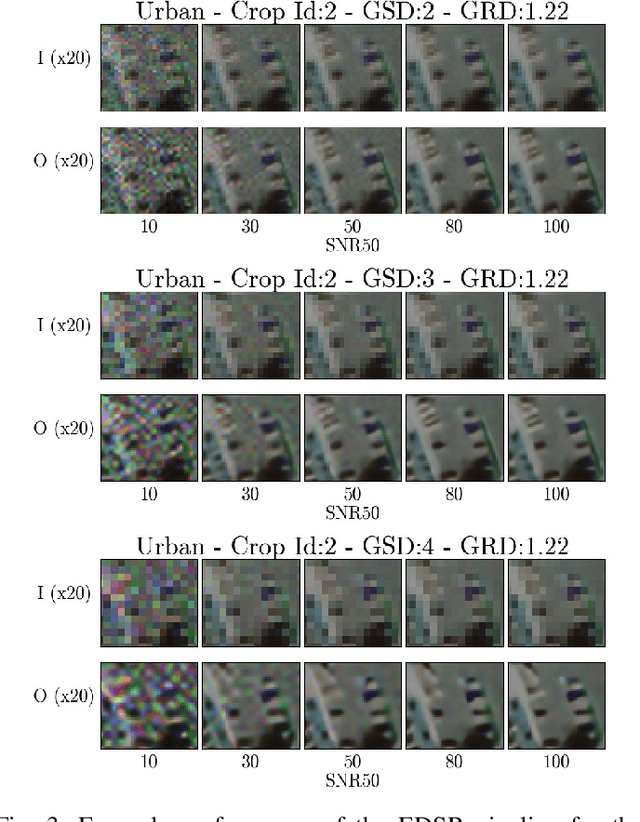
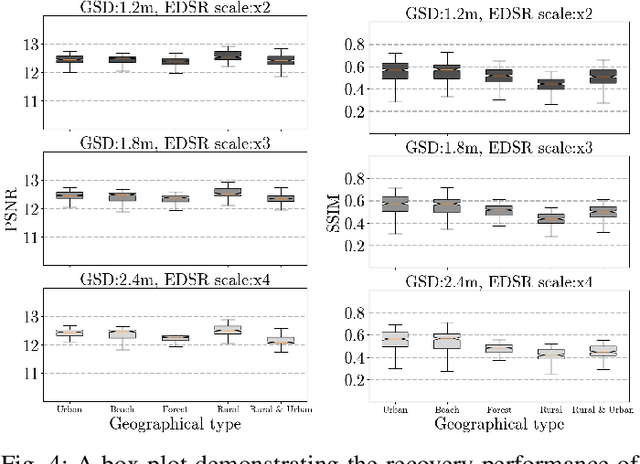
Modern deep Super-Resolution (SR) networks have established themselves as valuable techniques in image reconstruction and enhancement. However, these networks are normally trained and tested on benchmark image data that lacks the typical image degrading noise present in real images. In this paper, we test the feasibility of using deep SR in real remote sensing payloads by assessing SR performance in reconstructing realistically degraded satellite images. We demonstrate that a state-of-the-art SR technique called Enhanced Deep Super-Resolution Network (EDSR), without domain specific pre-training, can recover encoded pixel data on images with poor ground sampling distance, provided the ground resolved distance is sufficient. However, this recovery varies amongst selected geographical types. Our results indicate that custom training has potential to further improve reconstruction of overhead imagery, and that new satellite hardware should prioritise optical performance over minimising pixel size as deep SR can overcome a lack of the latter but not the former.