 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynaformer: A Deep Learning Model for Ageing-aware Battery Discharge Prediction
Jun 01, 2022
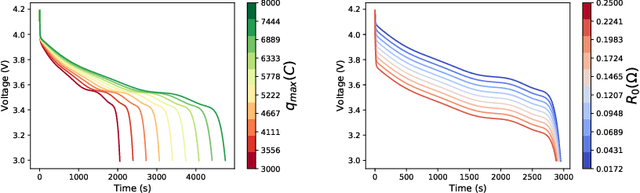
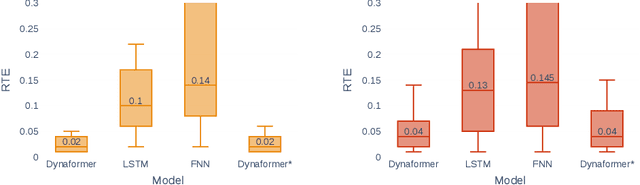
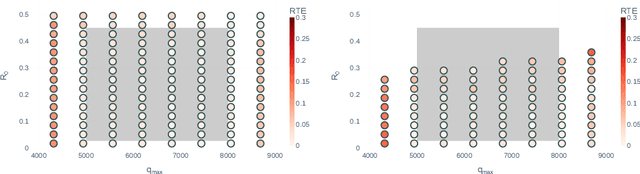
Electrochemical batteries are ubiquitous devices in our society. When they are employed in mission-critical applications, the ability to precisely predict the end of discharge under highly variable environmental and operating conditions is of paramount importance in order to support operational decision-making. While there are accurate predictive models of the processes underlying the charge and discharge phases of batteries, the modelling of ageing and its effect on performance remains poorly understood. Such a lack of understanding often leads to inaccurate models or the need for time-consuming calibration procedures whenever the battery ages or its conditions change significantly. This represents a major obstacle to the real-world deployment of efficient and robust battery management systems. In this paper, we propose for the first time an approach that can predict the voltage discharge curve for batteries of any degradation level without the need for calibration. In particular, we introduce Dynaformer, a novel Transformer-based deep learning architecture which is able to simultaneously infer the ageing state from a limited number of voltage/current samples and predict the full voltage discharge curve for real batteries with high precision. Our experiments show that the trained model is effective for input current profiles of different complexities and is robust to a wide range of degradation levels. In addition to evaluating the performance of the proposed framework on simulated data, we demonstrate that a minimal amount of fine-tuning allows the model to bridge the simulation-to-real gap between simulations and real data collected from a set of batteries. The proposed methodology enables the utilization of battery-powered systems until the end of discharge in a controlled and predictable way, thereby significantly prolonging the operating cycles and reducing costs.
A Prescriptive Dirichlet Power Allocation Policy with Deep Reinforcement Learning
Jan 20, 2022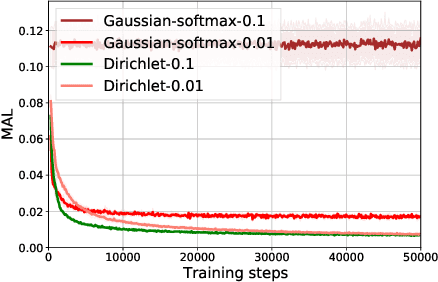


Prescribing optimal operation based on the condition of the system and, thereby, potentially prolonging the remaining useful lifetime has a large potential for actively managing the availability, maintenance and costs of complex systems. Reinforcement learning (RL) algorithms are particularly suitable for this type of problems given their learning capabilities. A special case of a prescriptive operation is the power allocation task, which can be considered as a sequential allocation problem, where the action space is bounded by a simplex constraint. A general continuous action-space solution of such sequential allocation problems has still remained an open research question for RL algorithms. In continuous action-space, the standard Gaussian policy applied in reinforcement learning does not support simplex constraints, while the Gaussian-softmax policy introduces a bias during training. In this work, we propose the Dirichlet policy for continuous allocation tasks and analyze the bias and variance of its policy gradients. We demonstrate that the Dirichlet policy is bias-free and provides significantly faster convergence, better performance and better hyperparameters robustness over the Gaussian-softmax policy. Moreover, we demonstrate the applicability of the proposed algorithm on a prescriptive operation case, where we propose the Dirichlet power allocation policy and evaluate the performance on a case study of a set of multiple lithium-ion (Li-I) battery systems. The experimental results show the potential to prescribe optimal operation, improve the efficiency and sustainability of multi-power source systems.
Real-Time Model Calibration with Deep Reinforcement Learning
Jun 09, 2020

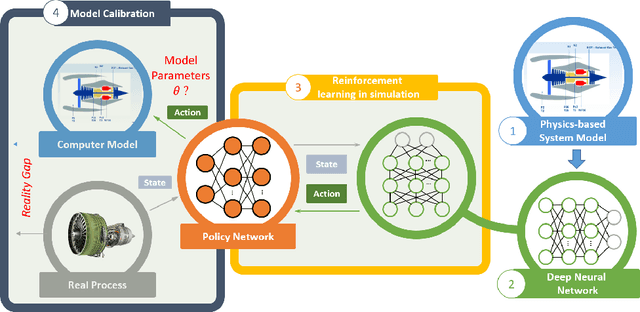
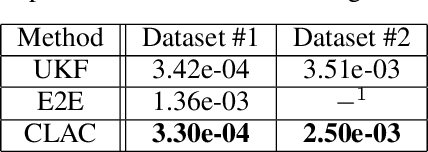
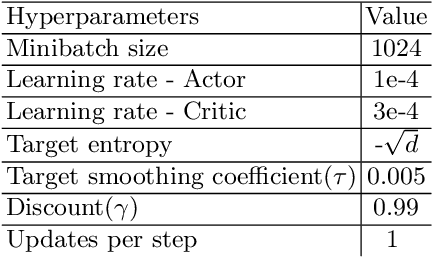
The dynamic, real-time, and accurate inference of model parameters from empirical data is of great importance in many scientific and engineering disciplines that use computational models (such as a digital twin) for the analysis and prediction of complex physical processes. However, fast and accurate inference for processes with large and high dimensional datasets cannot easily be achieved with state-of-the-art methods under noisy real-world conditions. The primary reason is that the inference of model parameters with traditional techniques based on optimisation or sampling often suffers from computational and statistical challenges, resulting in a trade-off between accuracy and deployment time. In this paper, we propose a novel framework for inference of model parameters based on reinforcement learning. The contribution of the paper is twofold: 1) We reformulate the inference problem as a tracking problem with the objective of learning a policy that forces the response of the physics-based model to follow the observations; 2) We propose the constrained Lyapunov-based actor-critic (CLAC) algorithm to enable the robust and accurate inference of physics-based model parameters in real time under noisy real-world conditions. The proposed methodology is demonstrated and evaluated on two model-based diagnostics test cases utilizing two different physics-based models of turbofan engines. The performance of the methodology is compared to that of two alternative approaches: a state update method (unscented Kalman filter) and a supervised end-to-end mapping with deep neural networks. The experimental results demonstrate that the proposed methodology outperforms all other tested methods in terms of speed and robustness, with high inference accuracy.