 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark on Uncertainty Quantification for Deep Learning Prognostics
Feb 09, 2023Reliable uncertainty quantification on RUL prediction is crucial for informative decision-making in predictive maintenance. In this context, we assess some of the latest developments in the field of uncertainty quantification for prognostics deep learning. This includes the state-of-the-art variational inference algorithms for Bayesian neural networks (BNN) as well as popular alternatives such as Monte Carlo Dropout (MCD), deep ensembles (DE) and heteroscedastic neural networks (HNN). All the inference techniques share the same inception deep learning architecture as a functional model. We performed hyperparameter search to optimize the main variational and learning parameters of the algorithms. The performance of the methods is evaluated on a subset of the large NASA NCMAPSS dataset for aircraft engines. The assessment includes RUL prediction accuracy, the quality of predictive uncertainty, and the possibility to break down the total predictive uncertainty into its aleatoric and epistemic parts. The results show no method clearly outperforms the others in all the situations. Although all methods are close in terms of accuracy, we find differences in the way they estimate uncertainty. Thus, DE and MCD generally provide more conservative predictive uncertainty than BNN. Surprisingly, HNN can achieve strong results without the added training complexity and extra parameters of the BNN. For tasks like active learning where a separation of epistemic and aleatoric uncertainty is required, radial BNN and MCD seem the best options.
Uncertainty-aware Remaining Useful Life predictor
Apr 08, 2021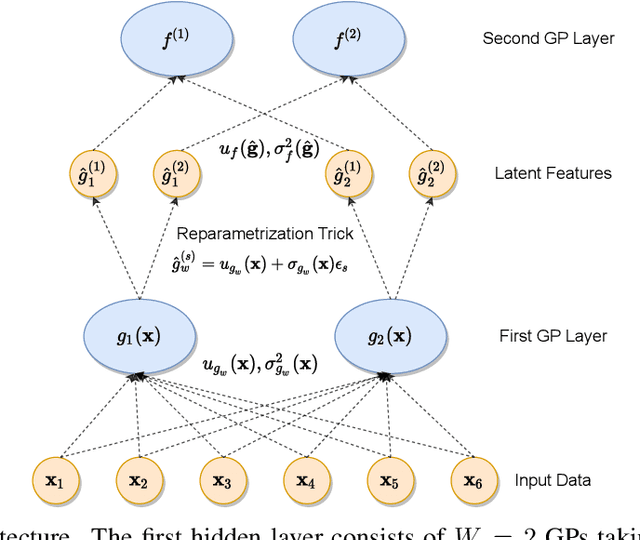


Remaining Useful Life (RUL) estimation is the problem of inferring how long a certain industrial asset can be expected to operate within its defined specifications. Deploying successful RUL prediction methods in real-life applications is a prerequisite for the design of intelligent maintenance strategies with the potential of drastically reducing maintenance costs and machine downtimes. In light of their superior performance in a wide range of engineering fields, Machine Learning (ML) algorithms are natural candidates to tackle the challenges involved in the design of intelligent maintenance systems. In particular, given the potentially catastrophic consequences or substantial costs associated with maintenance decisions that are either too late or too early, it is desirable that ML algorithms provide uncertainty estimates alongside their predictions. However, standard data-driven methods used for uncertainty estimation in RUL problems do not scale well to large datasets or are not sufficiently expressive to model the high-dimensional mapping from raw sensor data to RUL estimates. In this work, we consider Deep Gaussian Processes (DGPs) as possible solutions to the aforementioned limitations. We perform a thorough evaluation and comparison of several variants of DGPs applied to RUL predictions. The performance of the algorithms is evaluated on the N-CMAPSS (New Commercial Modular Aero-Propulsion System Simulation) dataset from NASA for aircraft engines. The results show that the proposed methods are able to provide very accurate RUL predictions along with sensible uncertainty estimates, providing more reliable solutions for (safety-critical) real-life industrial applications.
Real-Time Model Calibration with Deep Reinforcement Learning
Jun 09, 2020

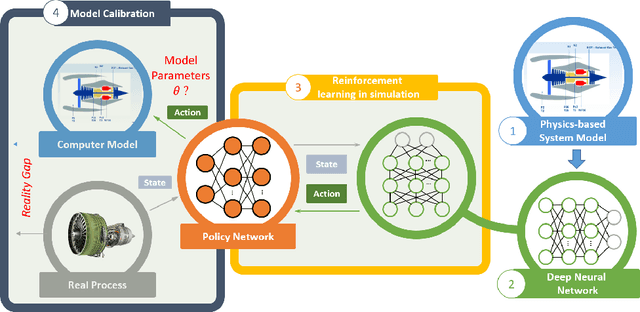
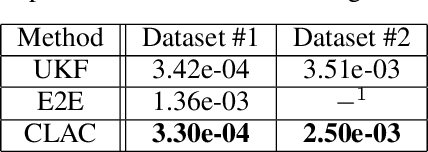
The dynamic, real-time, and accurate inference of model parameters from empirical data is of great importance in many scientific and engineering disciplines that use computational models (such as a digital twin) for the analysis and prediction of complex physical processes. However, fast and accurate inference for processes with large and high dimensional datasets cannot easily be achieved with state-of-the-art methods under noisy real-world conditions. The primary reason is that the inference of model parameters with traditional techniques based on optimisation or sampling often suffers from computational and statistical challenges, resulting in a trade-off between accuracy and deployment time. In this paper, we propose a novel framework for inference of model parameters based on reinforcement learning. The contribution of the paper is twofold: 1) We reformulate the inference problem as a tracking problem with the objective of learning a policy that forces the response of the physics-based model to follow the observations; 2) We propose the constrained Lyapunov-based actor-critic (CLAC) algorithm to enable the robust and accurate inference of physics-based model parameters in real time under noisy real-world conditions. The proposed methodology is demonstrated and evaluated on two model-based diagnostics test cases utilizing two different physics-based models of turbofan engines. The performance of the methodology is compared to that of two alternative approaches: a state update method (unscented Kalman filter) and a supervised end-to-end mapping with deep neural networks. The experimental results demonstrate that the proposed methodology outperforms all other tested methods in terms of speed and robustness, with high inference accuracy.
Knowledge-Induced Learning with Adaptive Sampling Variational Autoencoders for Open Set Fault Diagnostics
Dec 28, 2019
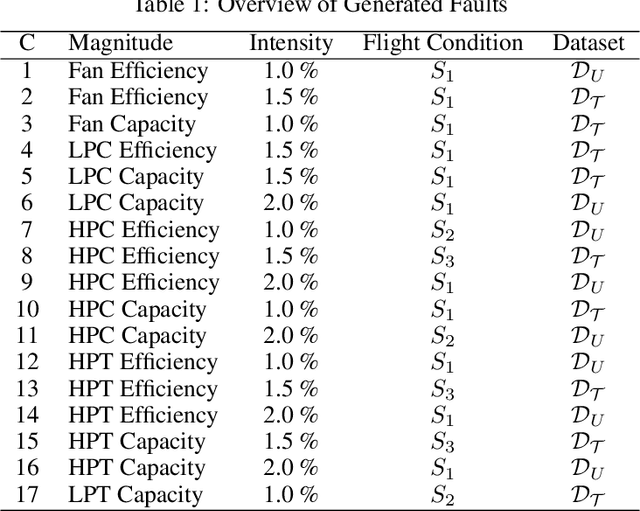

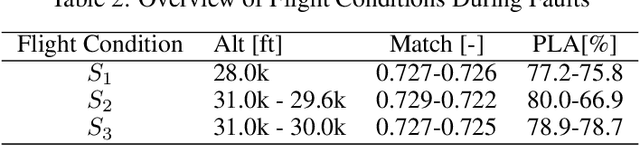
The recent increase in the availability of system condition monitoring data has lead to increases in the use of data-driven approaches for fault diagnostics. The accuracy of the fault detection and classification using these approaches is generally good when abundant labelled data on healthy and faulty system conditions exists and the diagnosis problem is formulated as a supervised learning task, i.e. supervised fault diagnosis. It is, however, relatively common in real situations that only a small fraction of the system condition monitoring data are labeled as healthy and the rest is unlabeled due to the uncertainty of the number and type of faults that may occur. In this case, supervised fault diagnosis performs poorly. Fault diagnosis with an unknown number and nature of faults is an open set learning problem where the knowledge of the faulty system is incomplete during training and the number and extent of the faults, of different types, can evolve during testing. In this paper, we propose to formulate the open set diagnostics problem as a semi-supervised learning problem and we demonstrate how it can be solved using a knowledge-induced learning approach with adaptive sampling variational autoencoders (KIL-AdaVAE) in combination with a one-class classifier. The fault detection and segmentation capability of the proposed method is demonstrated on a simulated case study using the Advanced Geared Turbofan 30000 (AGTF30) dynamical model under real flight conditions and induced faults of 17 fault types. The performance of the method is compared to the different learning strategies (supervised learning, supervised learning with embedding and semi-supervised learning) and deep learning algorithms. The results demonstrate that the proposed method is able to significantly outperform all other tested methods in terms of fault detection and fault segmentation.