 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntellectual Property in Graph-Based Machine Learning as a Service: Attacks and Defenses
Aug 27, 2025Graph-structured data, which captures non-Euclidean relationships and interactions between entities, is growing in scale and complexity. As a result, training state-of-the-art graph machine learning (GML) models have become increasingly resource-intensive, turning these models and data into invaluable Intellectual Property (IP). To address the resource-intensive nature of model training, graph-based Machine-Learning-as-a-Service (GMLaaS) has emerged as an efficient solution by leveraging third-party cloud services for model development and management. However, deploying such models in GMLaaS also exposes them to potential threats from attackers. Specifically, while the APIs within a GMLaaS system provide interfaces for users to query the model and receive outputs, they also allow attackers to exploit and steal model functionalities or sensitive training data, posing severe threats to the safety of these GML models and the underlying graph data. To address these challenges, this survey systematically introduces the first taxonomy of threats and defenses at the level of both GML model and graph-structured data. Such a tailored taxonomy facilitates an in-depth understanding of GML IP protection. Furthermore, we present a systematic evaluation framework to assess the effectiveness of IP protection methods, introduce a curated set of benchmark datasets across various domains, and discuss their application scopes and future challenges. Finally, we establish an open-sourced versatile library named PyGIP, which evaluates various attack and defense techniques in GMLaaS scenarios and facilitates the implementation of existing benchmark methods. The library resource can be accessed at: https://labrai.github.io/PyGIP. We believe this survey will play a fundamental role in intellectual property protection for GML and provide practical recipes for the GML community.
ADNP-15: An Open-Source Histopathological Dataset for Neuritic Plaque Segmentation in Human Brain Whole Slide Images with Frequency Domain Image Enhancement for Stain Normalization
May 08, 2025Alzheimer's Disease (AD) is a neurodegenerative disorder characterized by amyloid-beta plaques and tau neurofibrillary tangles, which serve as key histopathological features. The identification and segmentation of these lesions are crucial for understanding AD progression but remain challenging due to the lack of large-scale annotated datasets and the impact of staining variations on automated image analysis. Deep learning has emerged as a powerful tool for pathology image segmentation; however, model performance is significantly influenced by variations in staining characteristics, necessitating effective stain normalization and enhancement techniques. In this study, we address these challenges by introducing an open-source dataset (ADNP-15) of neuritic plaques (i.e., amyloid deposits combined with a crown of dystrophic tau-positive neurites) in human brain whole slide images. We establish a comprehensive benchmark by evaluating five widely adopted deep learning models across four stain normalization techniques, providing deeper insights into their influence on neuritic plaque segmentation. Additionally, we propose a novel image enhancement method that improves segmentation accuracy, particularly in complex tissue structures, by enhancing structural details and mitigating staining inconsistencies. Our experimental results demonstrate that this enhancement strategy significantly boosts model generalization and segmentation accuracy. All datasets and code are open-source, ensuring transparency and reproducibility while enabling further advancements in the field.
Bottom-Up Scattering Information Perception Network for SAR target recognition
Apr 07, 2025

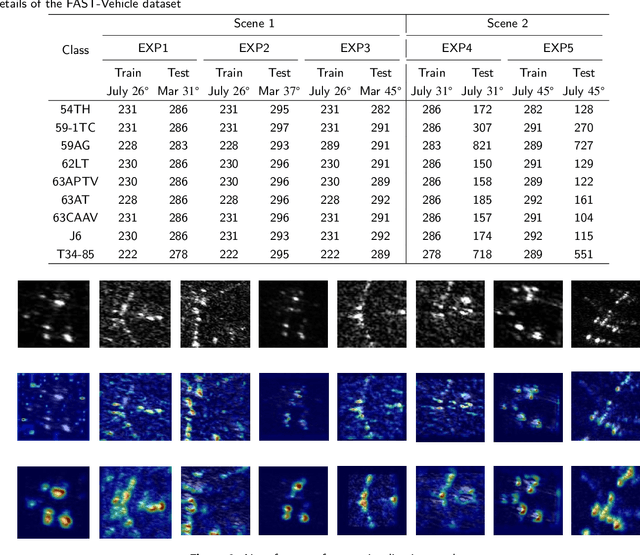

Deep learning methods based synthetic aperture radar (SAR) image target recognition tasks have been widely studied currently. The existing deep methods are insufficient to perceive and mine the scattering information of SAR images, resulting in performance bottlenecks and poor robustness of the algorithms. To this end, this paper proposes a novel bottom-up scattering information perception network for more interpretable target recognition by constructing the proprietary interpretation network for SAR images. Firstly, the localized scattering perceptron is proposed to replace the backbone feature extractor based on CNN networks to deeply mine the underlying scattering information of the target. Then, an unsupervised scattering part feature extraction model is proposed to robustly characterize the target scattering part information and provide fine-grained target representation. Finally, by aggregating the knowledge of target parts to form the complete target description, the interpretability and discriminative ability of the model is improved. We perform experiments on the FAST-Vehicle dataset and the SAR-ACD dataset to validate the performance of the proposed method.
Cooperative Tri-Point Model-Based Ground-to-Air Coverage Extension in Beyond 5G Networks
Jan 18, 2024The utilization of existing terrestrial infrastructures to provide coverage for aerial users is a potentially low-cost solution. However, the already deployed terrestrial base stations (TBSs) result in weak ground-to-air (G2A) coverage due to the down-tilted antennas. Furthermore, achieving optimal coverage across the entire airspace through antenna adjustment is challenging due to the complex signal coverage requirements in three-dimensional space, especially in the vertical direction. In this paper, we propose a cooperative tri-point (CoTP) model-based method that utilizes cooperative beams to enhance the G2A coverage extension. To utilize existing TBSs for establishing effective cooperation, we prove that the cooperation among three TBSs can ensure G2A coverage with a minimum coverage overlap, and design the CoTP model to analyze the G2A coverage extension. Using the model, a cooperative coverage structure based on Delaunay triangulation is designed to divide triangular prism-shaped subspaces and corresponding TBS cooperation sets. To enable TBSs in the cooperation set to cover different height subspaces while maintaining ground coverage, we design a cooperative beam generation algorithm to maximize the coverage in the triangular prism-shaped airspace. The simulation results and field trials demonstrate that the proposed method can efficiently enhance the G2A coverage extension while guaranteeing ground coverage.
Energy-Efficient Power Control for Multiple-Task Split Inference in UAVs: A Tiny Learning-Based Approach
Dec 31, 2023The limited energy and computing resources of unmanned aerial vehicles (UAVs) hinder the application of aerial artificial intelligence. The utilization of split inference in UAVs garners significant attention due to its effectiveness in mitigating computing and energy requirements. However, achieving energy-efficient split inference in UAVs remains complex considering of various crucial parameters such as energy level and delay constraints, especially involving multiple tasks. In this paper, we present a two-timescale approach for energy minimization in split inference, where discrete and continuous variables are segregated into two timescales to reduce the size of action space and computational complexity. This segregation enables the utilization of tiny reinforcement learning (TRL) for selecting discrete transmission modes for sequential tasks. Moreover, optimization programming (OP) is embedded between TRL's output and reward function to optimize the continuous transmit power. Specifically, we replace the optimization of transmit power with that of transmission time to decrease the computational complexity of OP since we reveal that energy consumption monotonically decreases with increasing transmission time. The replacement significantly reduces the feasible region and enables a fast solution according to the closed-form expression for optimal transmit power. Simulation results show that the proposed algorithm can achieve a higher probability of successful task completion with lower energy consumption.