 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransiT: Transient Transformer for Non-line-of-sight Videography
Mar 14, 2025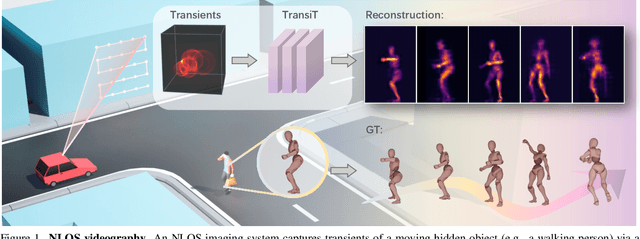
High quality and high speed videography using Non-Line-of-Sight (NLOS) imaging benefit autonomous navigation, collision prevention, and post-disaster search and rescue tasks. Current solutions have to balance between the frame rate and image quality. High frame rates, for example, can be achieved by reducing either per-point scanning time or scanning density, but at the cost of lowering the information density at individual frames. Fast scanning process further reduces the signal-to-noise ratio and different scanning systems exhibit different distortion characteristics. In this work, we design and employ a new Transient Transformer architecture called TransiT to achieve real-time NLOS recovery under fast scans. TransiT directly compresses the temporal dimension of input transients to extract features, reducing computation costs and meeting high frame rate requirements. It further adopts a feature fusion mechanism as well as employs a spatial-temporal Transformer to help capture features of NLOS transient videos. Moreover, TransiT applies transfer learning to bridge the gap between synthetic and real-measured data. In real experiments, TransiT manages to reconstruct from sparse transients of $16 \times 16$ measured at an exposure time of 0.4 ms per point to NLOS videos at a $64 \times 64$ resolution at 10 frames per second. We will make our code and dataset available to the community.