 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploreGS: a vision-based low overhead framework for 3D scene reconstruction
May 14, 2025
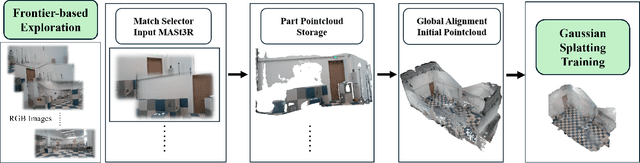


This paper proposes a low-overhead, vision-based 3D scene reconstruction framework for drones, named ExploreGS. By using RGB images, ExploreGS replaces traditional lidar-based point cloud acquisition process with a vision model, achieving a high-quality reconstruction at a lower cost. The framework integrates scene exploration and model reconstruction, and leverags a Bag-of-Words(BoW) model to enable real-time processing capabilities, therefore, the 3D Gaussian Splatting (3DGS) training can be executed on-board. Comprehensive experiments in both simulation and real-world environments demonstrate the efficiency and applicability of the ExploreGS framework on resource-constrained devices, while maintaining reconstruction quality comparable to state-of-the-art methods.
TDLE: 2-D LiDAR Exploration With Hierarchical Planning Using Regional Division
Jul 06, 2023Exploration systems are critical for enhancing the autonomy of robots. Due to the unpredictability of the future planning space, existing methods either adopt an inefficient greedy strategy or require a lot of resources to obtain a global solution. In this work, we address the challenge of obtaining global exploration routes with minimal computing resources. A hierarchical planning framework dynamically divides the planning space into subregions and arranges their orders to provide global guidance for exploration. Indicators that are compatible with the subregion order are used to choose specific exploration targets, thereby considering estimates of spatial structure and extending the planning space to unknown regions. Extensive simulations and field tests demonstrate the efficacy of our method in comparison to existing 2D LiDAR-based approaches. Our code has been made public for further investigation.
UMS-VINS: United Monocular-Stereo Features for Visual-Inertial Tightly Coupled Odometry
Mar 15, 2023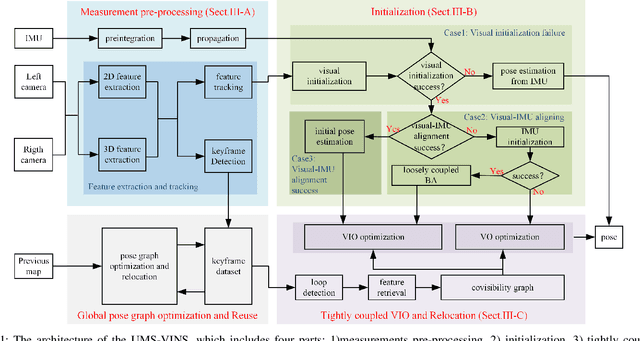
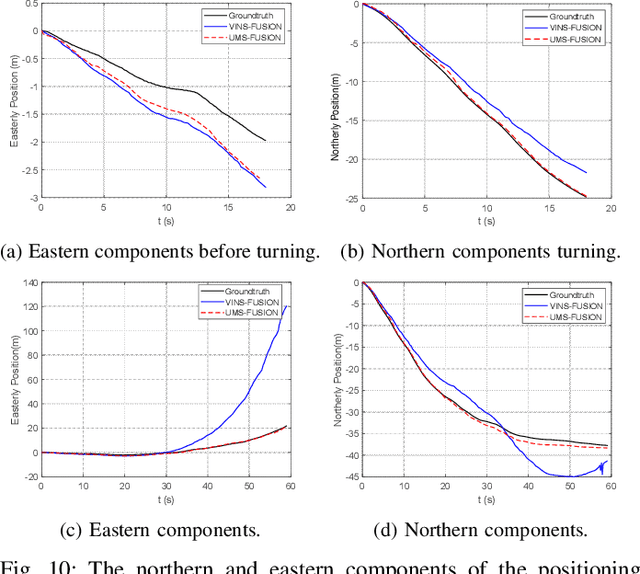
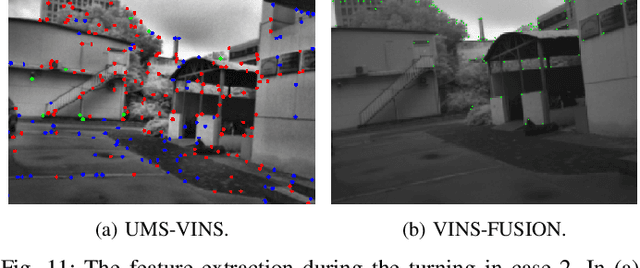
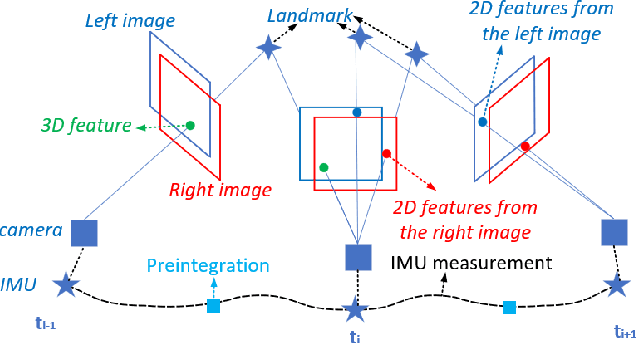
This paper introduces the united monocular-stereo features into a visual-inertial tightly coupled odometry (UMS-VINS) for robust pose estimation. UMS-VINS requires two cameras and a low-cost inertial measurement unit (IMU). The UMS-VINS is an evolution of VINS-FUSION, which modifies the VINS-FUSION from the following three perspectives. 1) UMS-VINS extracts and tracks features from the sub-pixel plane to achieve better positions of the features. 2) UMS-VINS introduces additional 2-dimensional features from the left and/or right cameras. 3) If the visual initialization fails, the IMU propagation is directly used for pose estimation, and if the visual-IMU alignment fails, UMS-VINS estimates the pose via the visual odometry. The performances on both public datasets and new real-world experiments indicate that the proposed UMS-VINS outperforms the VINS-FUSION from the perspective of localization accuracy, localization robustness, and environmental adaptability.