 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOAT: Ordered Action Tokenization
Feb 04, 2026Autoregressive policies offer a compelling foundation for scalable robot learning by enabling discrete abstraction, token-level reasoning, and flexible inference. However, applying autoregressive modeling to continuous robot actions requires an effective action tokenization scheme. Existing approaches either rely on analytical discretization methods that produce prohibitively long token sequences, or learned latent tokenizers that lack structure, limiting their compatibility with next-token prediction. In this work, we identify three desiderata for action tokenization - high compression, total decodability, and a left-to-right causally ordered token space - and introduce Ordered Action Tokenization (OAT), a learned action tokenizer that satisfies all three. OAT discretizes action chunks into an ordered sequence of tokens using transformer with registers, finite scalar quantization, and ordering-inducing training mechanisms. The resulting token space aligns naturally with autoregressive generation and enables prefix-based detokenization, yielding an anytime trade-off between inference cost and action fidelity. Across more than 20 tasks spanning four simulation benchmarks and real-world settings, autoregressive policies equipped with OAT consistently outperform prior tokenization schemes and diffusion-based baselines, while offering significantly greater flexibility at inference time.
Flexible Multitask Learning with Factorized Diffusion Policy
Dec 26, 2025Multitask learning poses significant challenges due to the highly multimodal and diverse nature of robot action distributions. However, effectively fitting policies to these complex task distributions is often difficult, and existing monolithic models often underfit the action distribution and lack the flexibility required for efficient adaptation. We introduce a novel modular diffusion policy framework that factorizes complex action distributions into a composition of specialized diffusion models, each capturing a distinct sub-mode of the behavior space for a more effective overall policy. In addition, this modular structure enables flexible policy adaptation to new tasks by adding or fine-tuning components, which inherently mitigates catastrophic forgetting. Empirically, across both simulation and real-world robotic manipulation settings, we illustrate how our method consistently outperforms strong modular and monolithic baselines.
Hybrid Diffusion for Simultaneous Symbolic and Continuous Planning
Sep 26, 2025Constructing robots to accomplish long-horizon tasks is a long-standing challenge within artificial intelligence. Approaches using generative methods, particularly Diffusion Models, have gained attention due to their ability to model continuous robotic trajectories for planning and control. However, we show that these models struggle with long-horizon tasks that involve complex decision-making and, in general, are prone to confusing different modes of behavior, leading to failure. To remedy this, we propose to augment continuous trajectory generation by simultaneously generating a high-level symbolic plan. We show that this requires a novel mix of discrete variable diffusion and continuous diffusion, which dramatically outperforms the baselines. In addition, we illustrate how this hybrid diffusion process enables flexible trajectory synthesis, allowing us to condition synthesized actions on partial and complete symbolic conditions.
Localized Graph-Based Neural Dynamics Models for Terrain Manipulation
Mar 30, 2025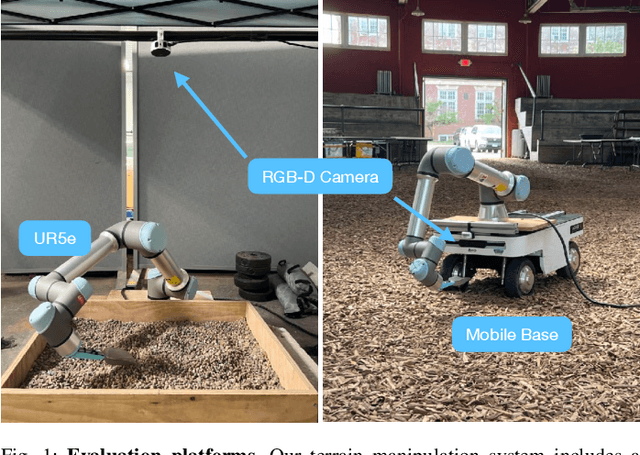

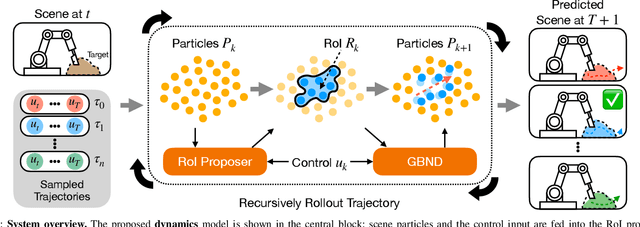

Predictive models can be particularly helpful for robots to effectively manipulate terrains in construction sites and extraterrestrial surfaces. However, terrain state representations become extremely high-dimensional especially to capture fine-resolution details and when depth is unknown or unbounded. This paper introduces a learning-based approach for terrain dynamics modeling and manipulation, leveraging the Graph-based Neural Dynamics (GBND) framework to represent terrain deformation as motion of a graph of particles. Based on the principle that the moving portion of a terrain is usually localized, our approach builds a large terrain graph (potentially millions of particles) but only identifies a very small active subgraph (hundreds of particles) for predicting the outcomes of robot-terrain interaction. To minimize the size of the active subgraph we introduce a learning-based approach that identifies a small region of interest (RoI) based on the robot's control inputs and the current scene. We also introduce a novel domain boundary feature encoding that allows GBNDs to perform accurate dynamics prediction in the RoI interior while avoiding particle penetration through RoI boundaries. Our proposed method is both orders of magnitude faster than naive GBND and it achieves better overall prediction accuracy. We further evaluated our framework on excavation and shaping tasks on terrain with different granularity.
Learning Real-World Action-Video Dynamics with Heterogeneous Masked Autoregression
Feb 06, 2025We propose Heterogeneous Masked Autoregression (HMA) for modeling action-video dynamics to generate high-quality data and evaluation in scaling robot learning. Building interactive video world models and policies for robotics is difficult due to the challenge of handling diverse settings while maintaining computational efficiency to run in real time. HMA uses heterogeneous pre-training from observations and action sequences across different robotic embodiments, domains, and tasks. HMA uses masked autoregression to generate quantized or soft tokens for video predictions. \ourshort achieves better visual fidelity and controllability than the previous robotic video generation models with 15 times faster speed in the real world. After post-training, this model can be used as a video simulator from low-level action inputs for evaluating policies and generating synthetic data. See this link https://liruiw.github.io/hma for more information.
Implicit Graph Search for Planning on Graphs of Convex Sets
Oct 11, 2024



Graphs of Convex Sets (GCS) is a recent method for synthesizing smooth trajectories by decomposing the planning space into convex sets, forming a graph to encode the adjacency relationships within the decomposition, and then simultaneously searching this graph and optimizing parts of the trajectory to obtain the final trajectory. To do this, one must solve a Mixed Integer Convex Program (MICP) and to mitigate computational time, GCS proposes a convex relaxation that is empirically very tight. Despite this tight relaxation, motion planning with GCS for real-world robotics problems translates to solving the simultaneous batch optimization problem that may contain millions of constraints and therefore can be slow. This is further exacerbated by the fact that the size of the GCS problem is invariant to the planning query. Motivated by the observation that the trajectory solution lies only on a fraction of the set of convex sets, we present two implicit graph search methods for planning on the graph of convex sets called INSATxGCS (IxG) and IxG*. INterleaved Search And Trajectory optimization (INSAT) is a previously developed algorithm that alternates between searching on a graph and optimizing partial paths to find a smooth trajectory. By using an implicit graph search method INSAT on the graph of convex sets, we achieve faster planning while ensuring stronger guarantees on completeness and optimality. Moveover, introducing a search-based technique to plan on the graph of convex sets enables us to easily leverage well-established techniques such as search parallelization, lazy planning, anytime planning, and replanning as future work. Numerical comparisons against GCS demonstrate the superiority of IxG across several applications, including planning for an 18-degree-of-freedom multi-arm assembly scenario.