 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Korean NLP Tasks with Linguistically Informed Subword Tokenization and Sub-character Decomposition
Nov 07, 2023



We introduce a morpheme-aware subword tokenization method that utilizes sub-character decomposition to address the challenges of applying Byte Pair Encoding (BPE) to Korean, a language characterized by its rich morphology and unique writing system. Our approach balances linguistic accuracy with computational efficiency in Pre-trained Language Models (PLMs). Our evaluations show that this technique achieves good performances overall, notably improving results in the syntactic task of NIKL-CoLA. This suggests that integrating morpheme type information can enhance language models' syntactic and semantic capabilities, indicating that adopting more linguistic insights can further improve performance beyond standard morphological analysis.
Pruning Self-Attention for Zero-Shot Multi-Speaker Text-to-Speech
Aug 28, 2023For personalized speech generation, a neural text-to-speech (TTS) model must be successfully implemented with limited data from a target speaker. To this end, the baseline TTS model needs to be amply generalized to out-of-domain data (i.e., target speaker's speech). However, approaches to address this out-of-domain generalization problem in TTS have yet to be thoroughly studied. In this work, we propose an effective pruning method for a transformer known as sparse attention, to improve the TTS model's generalization abilities. In particular, we prune off redundant connections from self-attention layers whose attention weights are below the threshold. To flexibly determine the pruning strength for searching optimal degree of generalization, we also propose a new differentiable pruning method that allows the model to automatically learn the thresholds. Evaluations on zero-shot multi-speaker TTS verify the effectiveness of our method in terms of voice quality and speaker similarity.
* INTERSPEECH 2023
Efficient Obstacle Rearrangement for Object Manipulation Tasks in Cluttered Environments
Feb 19, 2019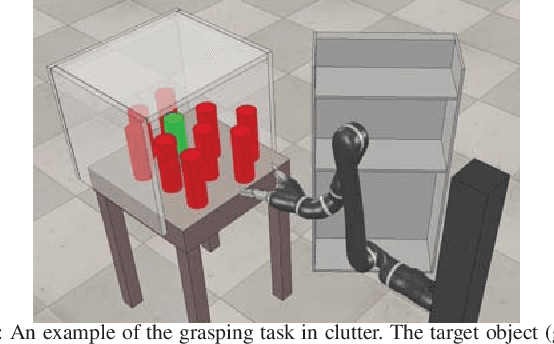

We present an algorithm that produces a plan for relocating obstacles in order to grasp a target in clutter by a robotic manipulator without collisions. We consider configurations where objects are densely populated in a constrained and confined space. Thus, there exists no collision-free path for the manipulator without relocating obstacles. Since the problem of planning for object rearrangement has shown to be NP-hard, it is difficult to perform manipulation tasks efficiently which could frequently happen in service domains (e.g., taking out a target from a shelf or a fridge). Our proposed planner employs a collision avoidance scheme which has been widely used in mobile robot navigation. The planner determines an obstacle to be removed quickly in real time. It also can deal with dynamic changes in the configuration (e.g., changes in object poses). Our method is shown to be complete and runs in polynomial time. Experimental results in a realistic simulated environment show that our method improves up to 31% of the execution time compared to other competitors.