 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical validation of synthetic pre-crash scenarios
May 06, 2026The representativeness of synthetic pre-crash scenarios is crucial for assessing the safety impact of Driving Automation Systems through virtual simulations. However, a gap remains in the robust evaluation of synthetic pre-crash scenarios' practical equivalence to their real-world counterparts; that is, whether they are similar enough for the intended assessment purpose. Conventional significance testing is inadequate, as it focuses on detecting differences rather than establishing practical equivalence. This study addresses the research gap by extending our previous work on a Bayesian Region of Practical Equivalence (ROPE)-based equivalence testing framework by introducing a binning-based approach to define appropriate statistics and equivalence criteria. Two binning-based statistics are proposed to measure practically meaningful distributional differences between datasets in the context of safety impact assessment. The framework's applicability is demonstrated through a case study, which tests the practical equivalence of two synthetic rear-end pre-crash datasets with a previously developed reference dataset in the context of the safety impact assessment of an Automatic Emergency Braking system. The results show that the framework provides informative quantitative assessments of practical equivalence as well as diagnostic insights into the divergence of datasets. Although the demonstration focuses on rear-end pre-crash scenarios, the framework is generic and extensible to broader validation contexts, providing an interpretable and principled basis for practical equivalence assessment across diverse synthetic data applications.
Practical Equivalence Testing and Its Application in Synthetic Pre-Crash Scenario Validation
May 19, 2025The use of representative pre-crash scenarios is critical for assessing the safety impact of driving automation systems through simulation. However, a gap remains in the robust evaluation of the similarity between synthetic and real-world pre-crash scenarios and their crash characteristics. Without proper validation, it cannot be ensured that the synthetic test scenarios adequately represent real-world driving behaviors and crash characteristics. One reason for this validation gap is the lack of focus on methods to confirm that the synthetic test scenarios are practically equivalent to real-world ones, given the assessment scope. Traditional statistical methods, like significance testing, focus on detecting differences rather than establishing equivalence; since failure to detect a difference does not imply equivalence, they are of limited applicability for validating synthetic pre-crash scenarios and crash characteristics. This study addresses this gap by proposing an equivalence testing method based on the Bayesian Region of Practical Equivalence (ROPE) framework. This method is designed to assess the practical equivalence of scenario characteristics that are most relevant for the intended assessment, making it particularly appropriate for the domain of virtual safety assessments. We first review existing equivalence testing methods. Then we propose and demonstrate the Bayesian ROPE-based method by testing the equivalence of two rear-end pre-crash datasets. Our approach focuses on the most relevant scenario characteristics. Our analysis provides insights into the practicalities and effectiveness of equivalence testing in synthetic test scenario validation and demonstrates the importance of testing for improving the credibility of synthetic data for automated vehicle safety assessment, as well as the credibility of subsequent safety impact assessments.
RAVE Checklist: Recommendations for Overcoming Challenges in Retrospective Safety Studies of Automated Driving Systems
Aug 14, 2024



The public, regulators, and domain experts alike seek to understand the effect of deployed SAE level 4 automated driving system (ADS) technologies on safety. The recent expansion of ADS technology deployments is paving the way for early stage safety impact evaluations, whereby the observational data from both an ADS and a representative benchmark fleet are compared to quantify safety performance. In January 2024, a working group of experts across academia, insurance, and industry came together in Washington, DC to discuss the current and future challenges in performing such evaluations. A subset of this working group then met, virtually, on multiple occasions to produce this paper. This paper presents the RAVE (Retrospective Automated Vehicle Evaluation) checklist, a set of fifteen recommendations for performing and evaluating retrospective ADS performance comparisons. The recommendations are centered around the concepts of (1) quality and validity, (2) transparency, and (3) interpretation. Over time, it is anticipated there will be a large and varied body of work evaluating the observed performance of these ADS fleets. Establishing and promoting good scientific practices benefits the work of stakeholders, many of whom may not be subject matter experts. This working group's intentions are to: i) strengthen individual research studies and ii) make the at-large community more informed on how to evaluate this collective body of work.
Model-based generation of representative rear-end crash scenarios across the full severity range using pre-crash data
Jun 21, 2024
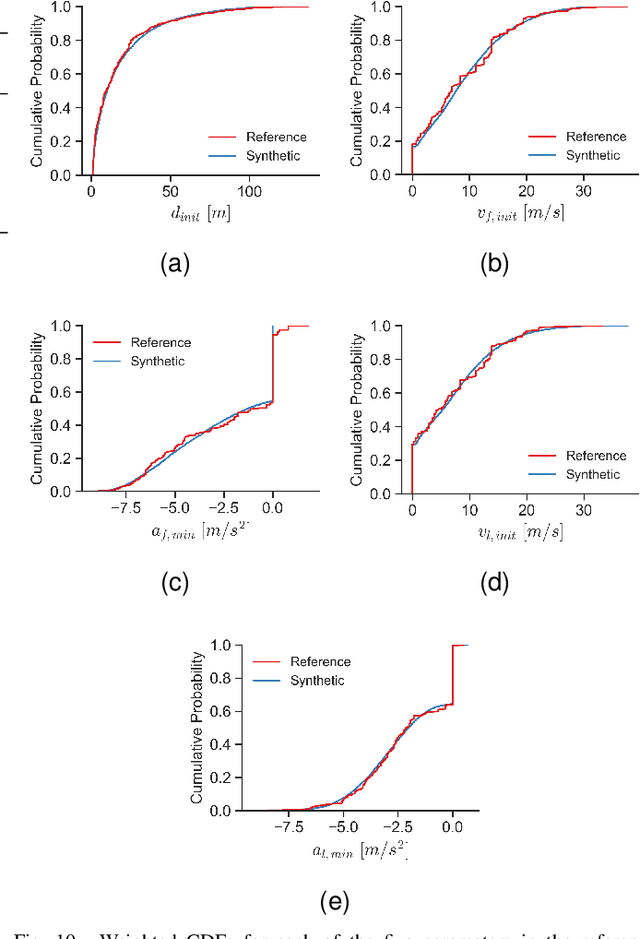

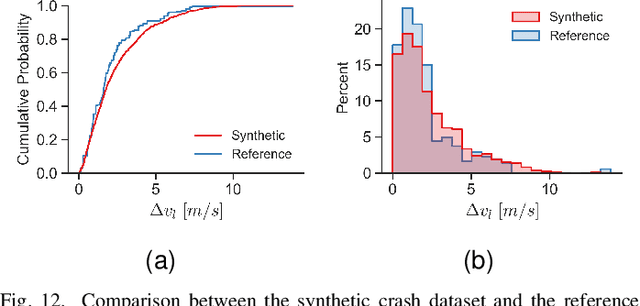
Generating representative rear-end crash scenarios is crucial for safety assessments of Advanced Driver Assistance Systems (ADAS) and Automated Driving systems (ADS). However, existing methods for scenario generation face challenges such as limited and biased in-depth crash data and difficulties in validation. This study sought to overcome these challenges by combining naturalistic driving data and pre-crash kinematics data from rear-end crashes. The combined dataset was weighted to create a representative dataset of rear-end crash characteristics across the full severity range in the United States. Multivariate distribution models were built for the combined dataset, and a driver behavior model for the following vehicle was created by combining two existing models. Simulations were conducted to generate a set of synthetic rear-end crash scenarios, which were then weighted to create a representative synthetic rear-end crash dataset. Finally, the synthetic dataset was validated by comparing the distributions of parameters and the outcomes (Delta-v, the total change in vehicle velocity over the duration of the crash event) of the generated crashes with those in the original combined dataset. The synthetic crash dataset can be used for the safety assessments of ADAS and ADS and as a benchmark when evaluating the representativeness of scenarios generated through other methods.
Evaluation of automated driving system safety metrics with logged vehicle trajectory data
Jan 03, 2024Real-time safety metrics are important for the automated driving system (ADS) to assess the risk of driving situations and to assist the decision-making. Although a number of real-time safety metrics have been proposed in the literature, systematic performance evaluation of these safety metrics has been lacking. As different behavioral assumptions are adopted in different safety metrics, it is difficult to compare the safety metrics and evaluate their performance. To overcome this challenge, in this study, we propose an evaluation framework utilizing logged vehicle trajectory data, in that vehicle trajectories for both subject vehicle (SV) and background vehicles (BVs) are obtained and the prediction errors caused by behavioral assumptions can be eliminated. Specifically, we examine whether the SV is in a collision unavoidable situation at each moment, given all near-future trajectories of BVs. In this way, we level the ground for a fair comparison of different safety metrics, as a good safety metric should always alarm in advance to the collision unavoidable moment. When trajectory data from a large number of trips are available, we can systematically evaluate and compare different metrics' statistical performance. In the case study, three representative real-time safety metrics, including the time-to-collision (TTC), the PEGASUS Criticality Metric (PCM), and the Model Predictive Instantaneous Safety Metric (MPrISM), are evaluated using a large-scale simulated trajectory dataset. The proposed evaluation framework is important for researchers, practitioners, and regulators to characterize different metrics, and to select appropriate metrics for different applications. Moreover, by conducting failure analysis on moments when a safety metric failed, we can identify its potential weaknesses which are valuable for its potential refinements and improvements.
Driver Behavior Extraction from Videos in Naturalistic Driving Datasets with 3D ConvNets
Nov 30, 2020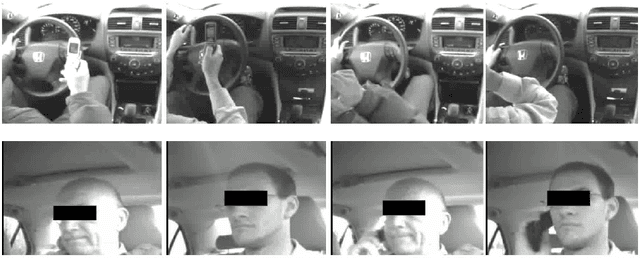
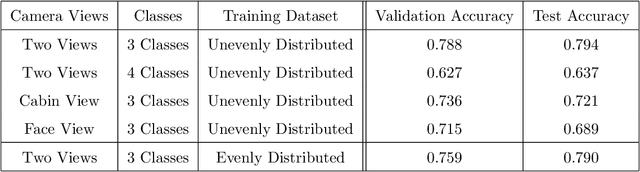

Naturalistic driving data (NDD) is an important source of information to understand crash causation and human factors and to further develop crash avoidance countermeasures. Videos recorded while driving are often included in such datasets. While there is often a large amount of video data in NDD, only a small portion of them can be annotated by human coders and used for research, which underuses all video data. In this paper, we explored a computer vision method to automatically extract the information we need from videos. More specifically, we developed a 3D ConvNet algorithm to automatically extract cell-phone-related behaviors from videos. The experiments show that our method can extract chunks from videos, most of which (~79%) contain the automatically labeled cell phone behaviors. In conjunction with human review of the extracted chunks, this approach can find cell-phone-related driver behaviors much more efficiently than simply viewing video.