 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAVE Checklist: Recommendations for Overcoming Challenges in Retrospective Safety Studies of Automated Driving Systems
Aug 14, 2024



The public, regulators, and domain experts alike seek to understand the effect of deployed SAE level 4 automated driving system (ADS) technologies on safety. The recent expansion of ADS technology deployments is paving the way for early stage safety impact evaluations, whereby the observational data from both an ADS and a representative benchmark fleet are compared to quantify safety performance. In January 2024, a working group of experts across academia, insurance, and industry came together in Washington, DC to discuss the current and future challenges in performing such evaluations. A subset of this working group then met, virtually, on multiple occasions to produce this paper. This paper presents the RAVE (Retrospective Automated Vehicle Evaluation) checklist, a set of fifteen recommendations for performing and evaluating retrospective ADS performance comparisons. The recommendations are centered around the concepts of (1) quality and validity, (2) transparency, and (3) interpretation. Over time, it is anticipated there will be a large and varied body of work evaluating the observed performance of these ADS fleets. Establishing and promoting good scientific practices benefits the work of stakeholders, many of whom may not be subject matter experts. This working group's intentions are to: i) strengthen individual research studies and ii) make the at-large community more informed on how to evaluate this collective body of work.
Collision Avoidance Testing of the Waymo Automated Driving System
Dec 15, 2022



This paper describes Waymo's Collision Avoidance Testing (CAT) methodology: a scenario-based testing method that evaluates the safety of the Waymo Driver Automated Driving Systems' (ADS) intended functionality in conflict situations initiated by other road users that require urgent evasive maneuvers. Because SAE Level 4 ADS are responsible for the dynamic driving task (DDT), when engaged, without immediate human intervention, evaluating a Level 4 ADS using scenario-based testing is difficult due to the potentially infinite number of operational scenarios in which hazardous situations may unfold. To that end, in this paper we first describe the safety test objectives for the CAT methodology, including the collision and serious injury metrics and the reference behavior model representing a non-impaired eyes on conflict human driver used to form an acceptance criterion. Afterward, we introduce the process for identifying potentially hazardous situations from a combination of human data, ADS testing data, and expert knowledge about the product design and associated Operational Design Domain (ODD). The test allocation and execution strategy is presented next, which exclusively utilize simulations constructed from sensor data collected on a test track, real-world driving, or from simulated sensor data. The paper concludes with the presentation of results from applying CAT to the fully autonomous ride-hailing service that Waymo operates in San Francisco, California and Phoenix, Arizona. The iterative nature of scenario identification, combined with over ten years of experience of on-road testing, results in a scenario database that converges to a representative set of responder role scenarios for a given ODD. Using Waymo's virtual test platform, which is calibrated to data collected as part of many years of ADS development, the CAT methodology provides a robust and scalable safety evaluation.
Waymo's Fatigue Risk Management Framework: Prevention, Monitoring, and Mitigation of Fatigue-Induced Risks while Testing Automated Driving Systems
Aug 26, 2022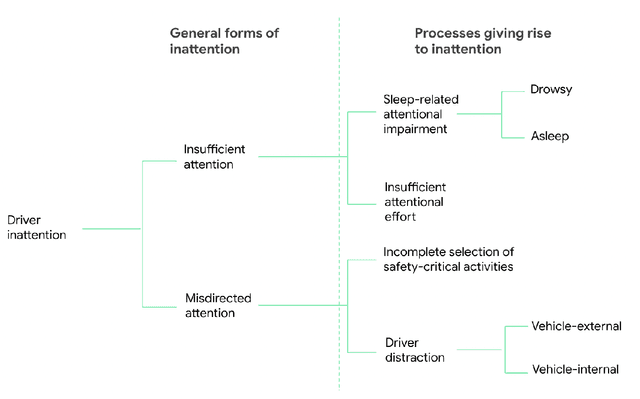
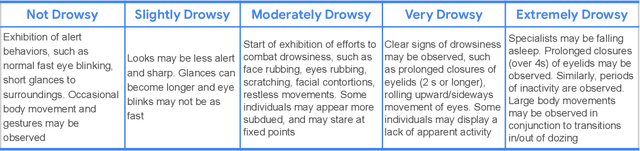
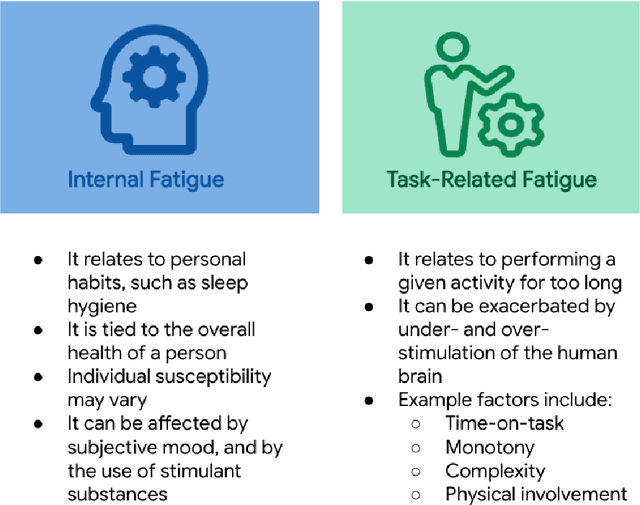
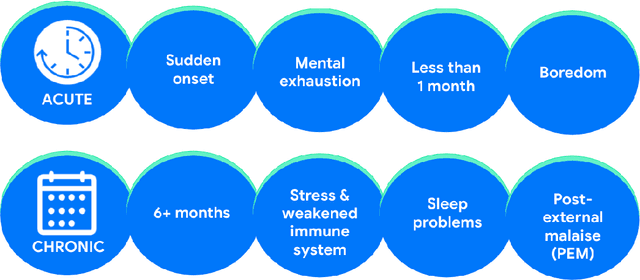
This report presents Waymo's proposal for a systematic fatigue risk management framework that addresses prevention, monitoring, and mitigation of fatigue-induced risks during on-road testing of ADS technology. The proposed framework remains flexible to incorporate continuous improvements, and was informed by state of the art practices, research, learnings, and experience (both internal and external to Waymo). Fatigue is a recognized contributory factor in a substantial fraction of on-road crashes involving human drivers, and mitigation of fatigue-induced risks is still an open concern researched world-wide. While the proposed framework was specifically designed in relation to on-road testing of SAE Level 4 ADS technology, it has implications and applicability to lower levels of automation as well.
Waymo's Safety Methodologies and Safety Readiness Determinations
Oct 30, 2020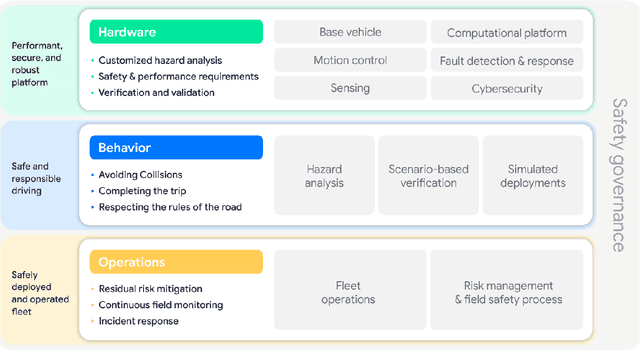
Waymo's safety methodologies, which draw on well established engineering processes and address new safety challenges specific to Automated Vehicle technology, provide a firm foundation for safe deployment of Waymo's Level 4 ADS, which Waymo also refers to as the Waymo Driver. Waymo's determination of its readiness to deploy its AVs safely in different settings rests on that firm foundation and on a thorough analysis of risks specific to a particular Operational Design Domain. Waymo's process for making these readiness determinations entails an ordered examination of the relevant outputs from all of its safety methodologies combined with careful safety and engineering judgment focused on the specific facts relevant for a particular determination. Waymo will approve when it determines the ADS is ready for the new conditions without creating any unreasonable risks to safety. This paper explains Waymo's methodologies as applied to the three layers of its technology: hardware, ADS behavior, and operations, and also explains Waymo's safety governance. Waymo will continue to apply and adapt those methodologies, and to learn from the important contributions of others in the AV industry, as Waymo continues to build an ever safer and more able ADS.
Waymo Public Road Safety Performance Data
Oct 30, 2020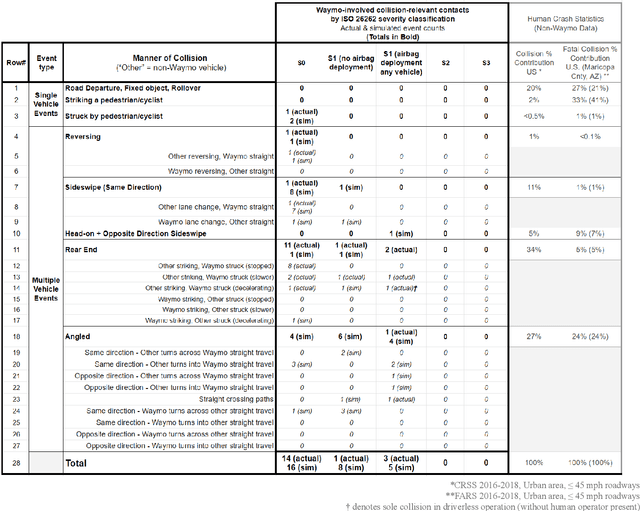
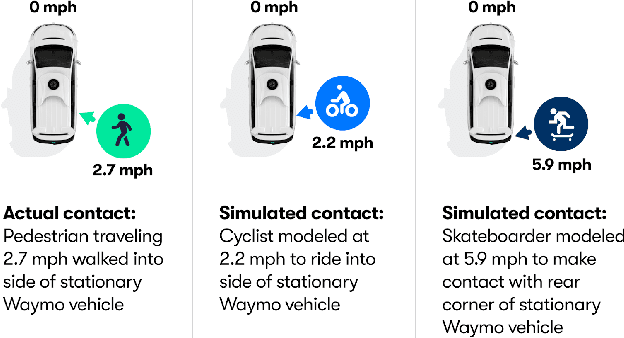
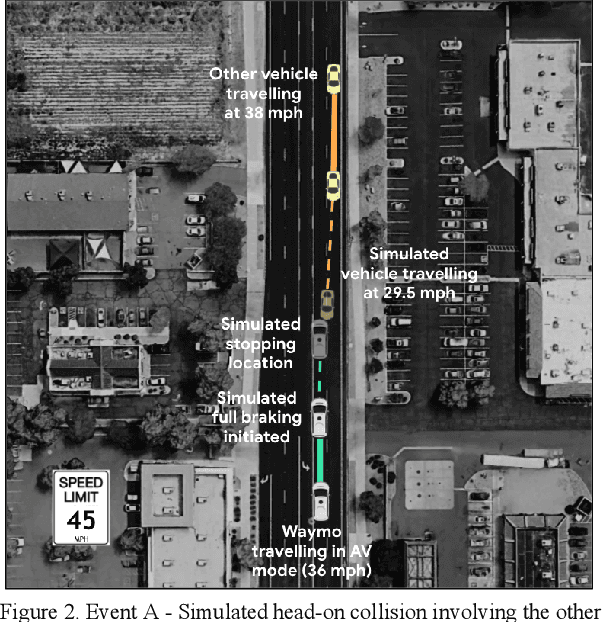
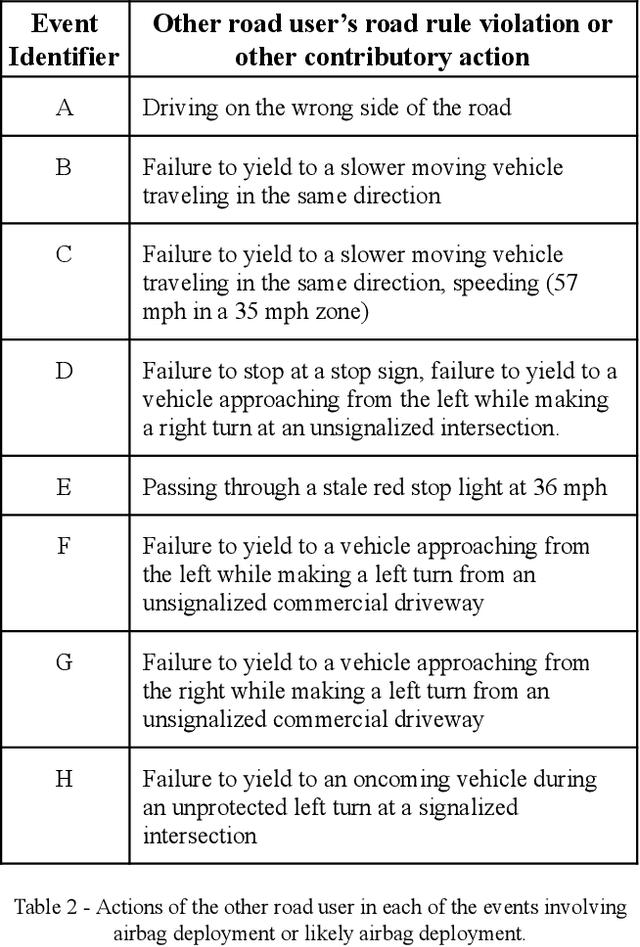
Waymo's mission to reduce traffic injuries and fatalities and improve mobility for all has led us to expand deployment of automated vehicles on public roads without a human driver behind the wheel. As part of this process, Waymo is committed to providing the public with informative and relevant data regarding the demonstrated safety of Waymo's automated driving system, which we call the Waymo Driver. The data presented in this paper represents more than 6.1 million miles of automated driving in the Phoenix, Arizona metropolitan area, including operations with a trained operator behind the steering wheel from calendar year 2019 and 65,000 miles of driverless operation without a human behind the steering wheel from 2019 and the first nine months of 2020. The paper includes every collision and minor contact experienced during these operations as well as every predicted contact identified using Waymo's counterfactual, what if, simulation of events had the vehicle's trained operator not disengaged automated driving. There were 47 contact events that occurred over this time period, consisting of 18 actual and 29 simulated contact events, none of which would be expected to result in severe or life threatening injuries. This paper presents the collision typology and severity for each actual and simulated event, along with diagrams depicting each of the most significant events. Nearly all the events involved one or more road rule violations or other errors by a human driver or road user, including all eight of the most severe events, which we define as involving actual or expected airbag deployment in any involved vehicle. When compared to national collision statistics, the Waymo Driver completely avoided certain collision modes that human driven vehicles are frequently involved in, including road departure and collisions with fixed objects.