 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Avoidance Testing of the Waymo Automated Driving System
Dec 15, 2022



This paper describes Waymo's Collision Avoidance Testing (CAT) methodology: a scenario-based testing method that evaluates the safety of the Waymo Driver Automated Driving Systems' (ADS) intended functionality in conflict situations initiated by other road users that require urgent evasive maneuvers. Because SAE Level 4 ADS are responsible for the dynamic driving task (DDT), when engaged, without immediate human intervention, evaluating a Level 4 ADS using scenario-based testing is difficult due to the potentially infinite number of operational scenarios in which hazardous situations may unfold. To that end, in this paper we first describe the safety test objectives for the CAT methodology, including the collision and serious injury metrics and the reference behavior model representing a non-impaired eyes on conflict human driver used to form an acceptance criterion. Afterward, we introduce the process for identifying potentially hazardous situations from a combination of human data, ADS testing data, and expert knowledge about the product design and associated Operational Design Domain (ODD). The test allocation and execution strategy is presented next, which exclusively utilize simulations constructed from sensor data collected on a test track, real-world driving, or from simulated sensor data. The paper concludes with the presentation of results from applying CAT to the fully autonomous ride-hailing service that Waymo operates in San Francisco, California and Phoenix, Arizona. The iterative nature of scenario identification, combined with over ten years of experience of on-road testing, results in a scenario database that converges to a representative set of responder role scenarios for a given ODD. Using Waymo's virtual test platform, which is calibrated to data collected as part of many years of ADS development, the CAT methodology provides a robust and scalable safety evaluation.
Model Predictive Instantaneous Safety Metric for Evaluation of Automated Driving Systems
May 20, 2020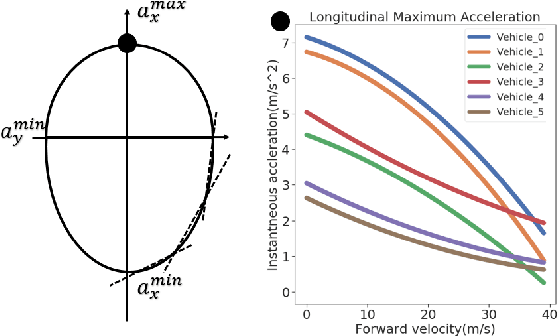

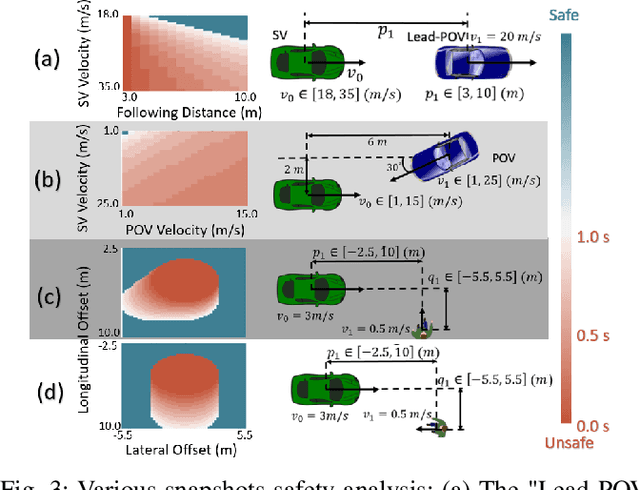
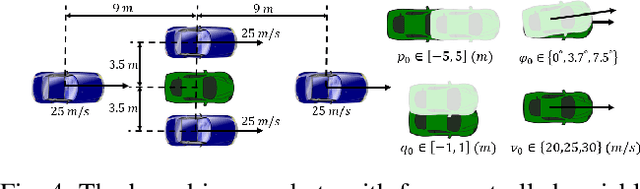
Vehicles with Automated Driving Systems (ADS) operate in a high-dimensional continuous system with multi-agent interactions. This continuous system features various types of traffic agents (non-homogeneous) governed by continuous-motion ordinary differential equations (differential-drive). Each agent makes decisions independently that may lead to conflicts with the subject vehicle (SV), as well as other participants (non-cooperative). A typical vehicle safety evaluation procedure that uses various safety-critical scenarios and observes resultant collisions (or near collisions), is not sufficient enough to evaluate the performance of the ADS in terms of operational safety status maintenance. In this paper, we introduce a Model Predictive Instantaneous Safety Metric (MPrISM), which determines the safety status of the SV, considering the worst-case safety scenario for a given traffic snapshot. The method then analyzes the SV's closeness to a potential collision within a certain evaluation time period. The described metric induces theoretical guarantees of safety in terms of the time to collision under standard assumptions. Through formulating the solution as a series of minimax quadratic optimization problems of a specific structure, the method is tractable for real-time safety evaluation applications. Its capabilities are demonstrated with synthesized examples and cases derived from real-world tests.