 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Instantaneous Safety Metric for Evaluation of Automated Driving Systems
Paper and Code
May 20, 2020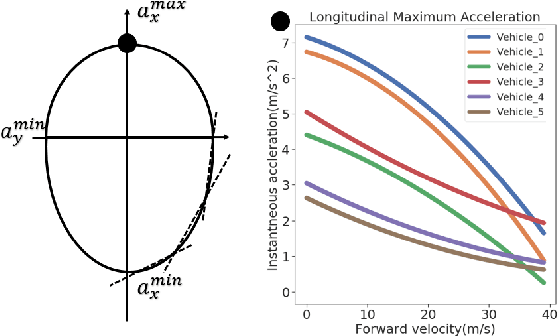

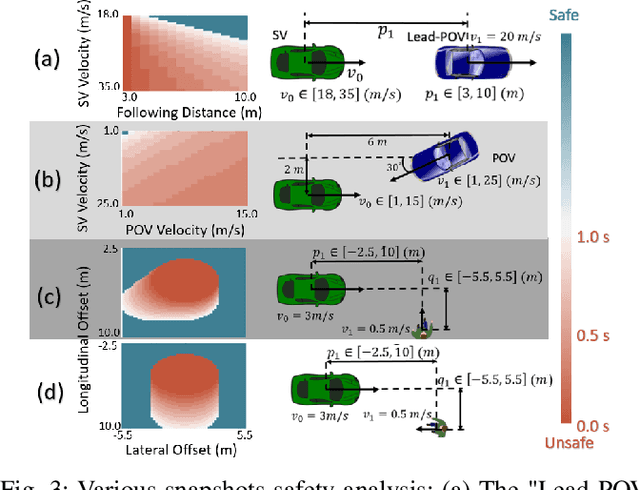
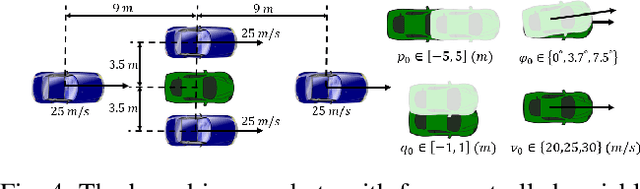
Vehicles with Automated Driving Systems (ADS) operate in a high-dimensional continuous system with multi-agent interactions. This continuous system features various types of traffic agents (non-homogeneous) governed by continuous-motion ordinary differential equations (differential-drive). Each agent makes decisions independently that may lead to conflicts with the subject vehicle (SV), as well as other participants (non-cooperative). A typical vehicle safety evaluation procedure that uses various safety-critical scenarios and observes resultant collisions (or near collisions), is not sufficient enough to evaluate the performance of the ADS in terms of operational safety status maintenance. In this paper, we introduce a Model Predictive Instantaneous Safety Metric (MPrISM), which determines the safety status of the SV, considering the worst-case safety scenario for a given traffic snapshot. The method then analyzes the SV's closeness to a potential collision within a certain evaluation time period. The described metric induces theoretical guarantees of safety in terms of the time to collision under standard assumptions. Through formulating the solution as a series of minimax quadratic optimization problems of a specific structure, the method is tractable for real-time safety evaluation applications. Its capabilities are demonstrated with synthesized examples and cases derived from real-world tests.