 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Diversity Analysis of Safety Metrics Comparing Vehicle Performance in the Lead-Vehicle Interaction Regime
Jun 26, 2023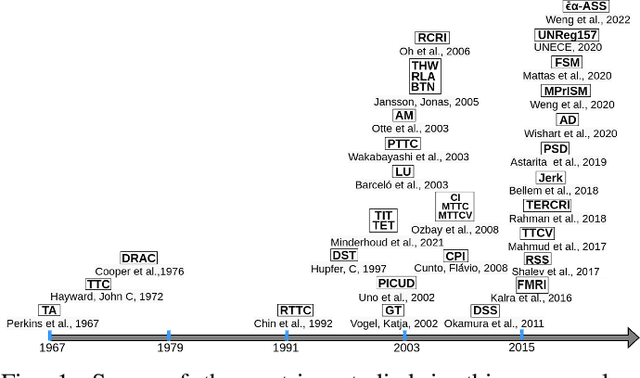
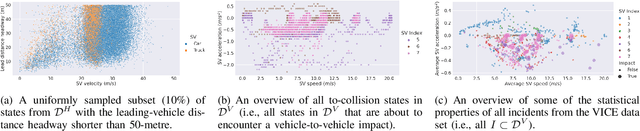
Vehicle performance metrics analyze data sets consisting of subject vehicle's interactions with other road users in a nominal driving environment and provide certain performance measures as outputs. To the best of the authors' knowledge, the vehicle safety performance metrics research dates back to at least 1967. To date, there still does not exist a community-wide accepted metric or a set of metrics for vehicle safety performance assessment and justification. This issue gets further amplified with the evolving interest in Advanced Driver Assistance Systems and Automated Driving Systems. In this paper, the authors seek to perform a unified study that facilitates an improved community-wide understanding of vehicle performance metrics using the lead-vehicle interaction operational design domain as a common means of performance comparison. In particular, the authors study the diversity (including constructive formulation discrepancies and empirical performance differences) among 33 base metrics with up to 51 metric variants (with different choices of hyper-parameters) in the existing literature, published between 1967 and 2022. Two data sets are adopted for the empirical performance diversity analysis, including vehicle trajectories from normal highway driving environment and relatively high-risk incidents with collisions and near-miss cases. The analysis further implies that (i) the conceptual acceptance of a safety metric proposal can be problematic if the assumptions, conditions, and types of outcome assurance are not justified properly, and (ii) the empirical performance justification of an acceptable metric can also be problematic as a dominant consensus is not observed among metrics empirically.
Model Predictive Instantaneous Safety Metric for Evaluation of Automated Driving Systems
May 20, 2020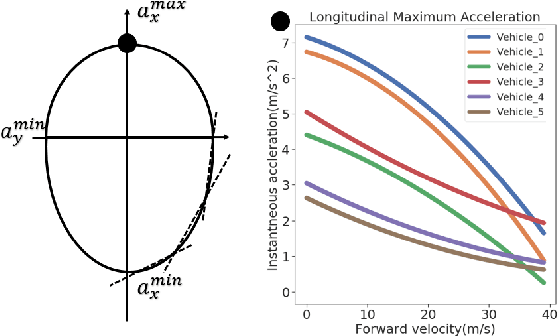

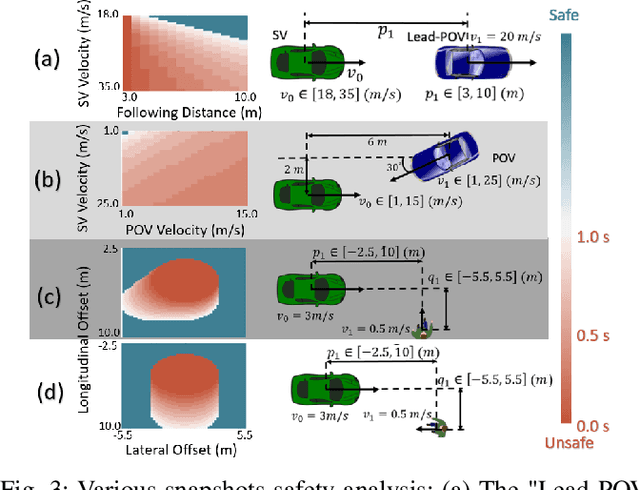
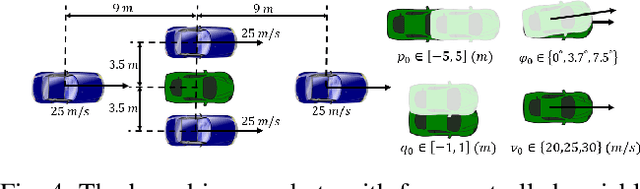
Vehicles with Automated Driving Systems (ADS) operate in a high-dimensional continuous system with multi-agent interactions. This continuous system features various types of traffic agents (non-homogeneous) governed by continuous-motion ordinary differential equations (differential-drive). Each agent makes decisions independently that may lead to conflicts with the subject vehicle (SV), as well as other participants (non-cooperative). A typical vehicle safety evaluation procedure that uses various safety-critical scenarios and observes resultant collisions (or near collisions), is not sufficient enough to evaluate the performance of the ADS in terms of operational safety status maintenance. In this paper, we introduce a Model Predictive Instantaneous Safety Metric (MPrISM), which determines the safety status of the SV, considering the worst-case safety scenario for a given traffic snapshot. The method then analyzes the SV's closeness to a potential collision within a certain evaluation time period. The described metric induces theoretical guarantees of safety in terms of the time to collision under standard assumptions. Through formulating the solution as a series of minimax quadratic optimization problems of a specific structure, the method is tractable for real-time safety evaluation applications. Its capabilities are demonstrated with synthesized examples and cases derived from real-world tests.