 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWaymo's Safety Methodologies and Safety Readiness Determinations
Oct 30, 2020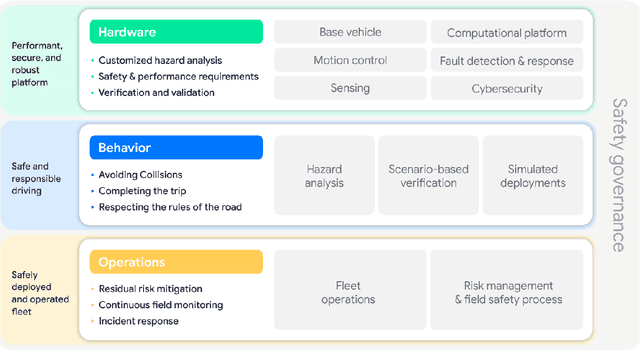
Waymo's safety methodologies, which draw on well established engineering processes and address new safety challenges specific to Automated Vehicle technology, provide a firm foundation for safe deployment of Waymo's Level 4 ADS, which Waymo also refers to as the Waymo Driver. Waymo's determination of its readiness to deploy its AVs safely in different settings rests on that firm foundation and on a thorough analysis of risks specific to a particular Operational Design Domain. Waymo's process for making these readiness determinations entails an ordered examination of the relevant outputs from all of its safety methodologies combined with careful safety and engineering judgment focused on the specific facts relevant for a particular determination. Waymo will approve when it determines the ADS is ready for the new conditions without creating any unreasonable risks to safety. This paper explains Waymo's methodologies as applied to the three layers of its technology: hardware, ADS behavior, and operations, and also explains Waymo's safety governance. Waymo will continue to apply and adapt those methodologies, and to learn from the important contributions of others in the AV industry, as Waymo continues to build an ever safer and more able ADS.
Waymo Public Road Safety Performance Data
Oct 30, 2020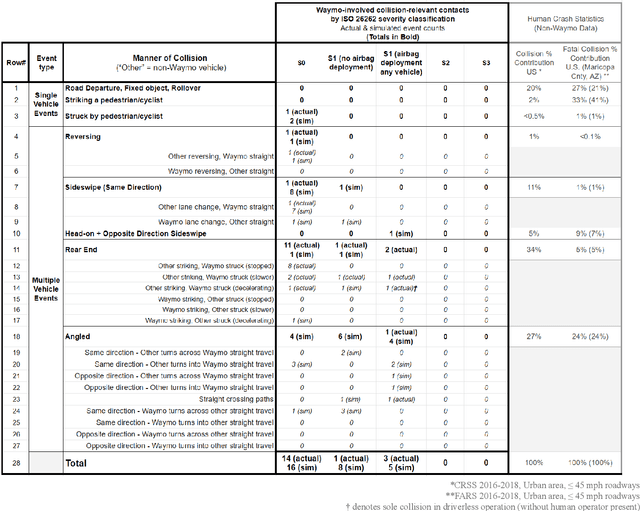
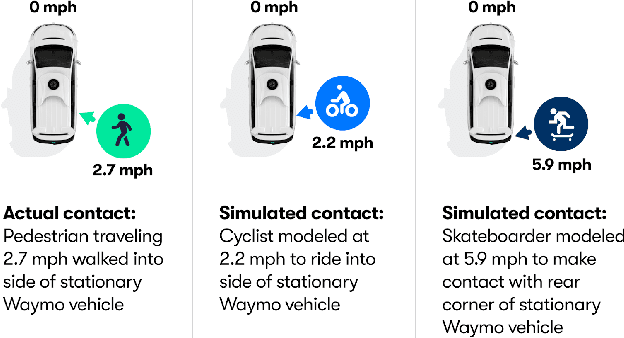
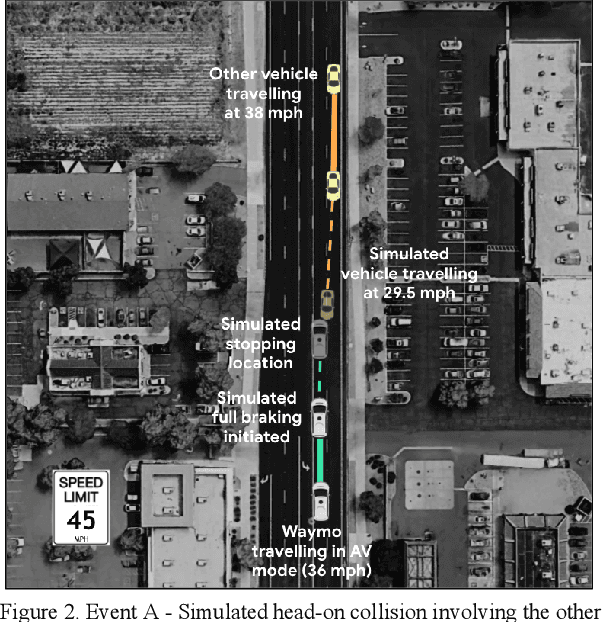
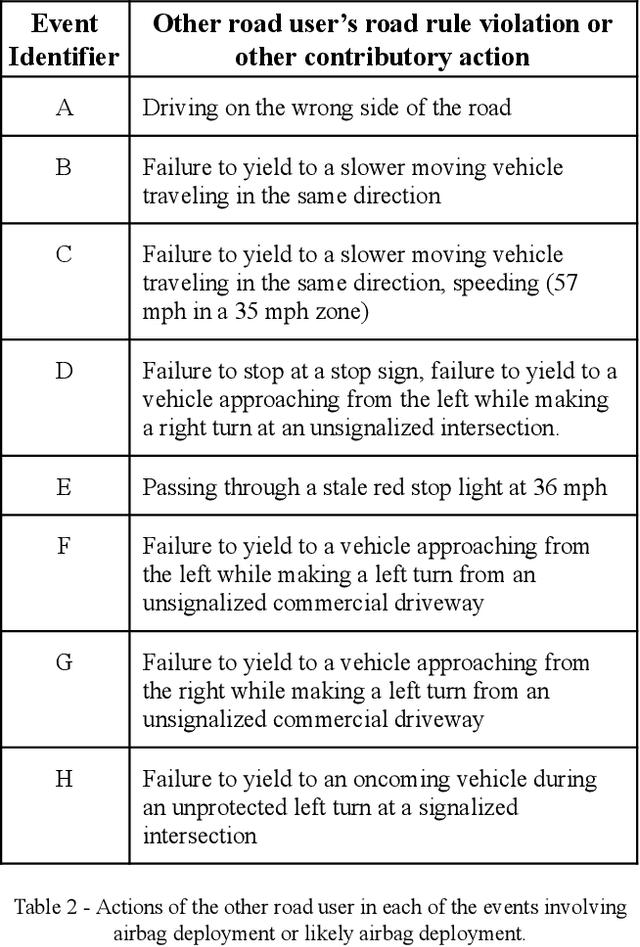
Waymo's mission to reduce traffic injuries and fatalities and improve mobility for all has led us to expand deployment of automated vehicles on public roads without a human driver behind the wheel. As part of this process, Waymo is committed to providing the public with informative and relevant data regarding the demonstrated safety of Waymo's automated driving system, which we call the Waymo Driver. The data presented in this paper represents more than 6.1 million miles of automated driving in the Phoenix, Arizona metropolitan area, including operations with a trained operator behind the steering wheel from calendar year 2019 and 65,000 miles of driverless operation without a human behind the steering wheel from 2019 and the first nine months of 2020. The paper includes every collision and minor contact experienced during these operations as well as every predicted contact identified using Waymo's counterfactual, what if, simulation of events had the vehicle's trained operator not disengaged automated driving. There were 47 contact events that occurred over this time period, consisting of 18 actual and 29 simulated contact events, none of which would be expected to result in severe or life threatening injuries. This paper presents the collision typology and severity for each actual and simulated event, along with diagrams depicting each of the most significant events. Nearly all the events involved one or more road rule violations or other errors by a human driver or road user, including all eight of the most severe events, which we define as involving actual or expected airbag deployment in any involved vehicle. When compared to national collision statistics, the Waymo Driver completely avoided certain collision modes that human driven vehicles are frequently involved in, including road departure and collisions with fixed objects.
GPU Based Path Integral Control with Learned Dynamics
Mar 01, 2015
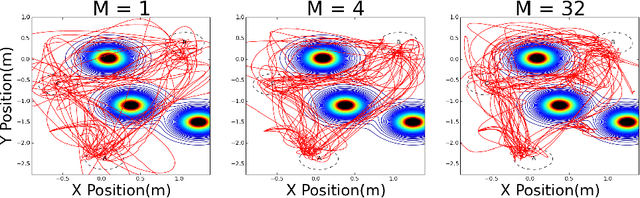

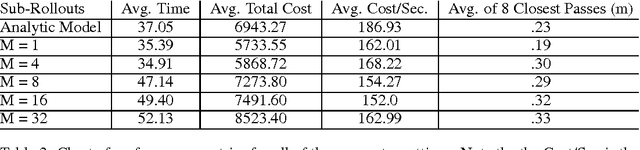
We present an algorithm which combines recent advances in model based path integral control with machine learning approaches to learning forward dynamics models. We take advantage of the parallel computing power of a GPU to quickly take a massive number of samples from a learned probabilistic dynamics model, which we use to approximate the path integral form of the optimal control. The resulting algorithm runs in a receding-horizon fashion in realtime, and is subject to no restrictive assumptions about costs, constraints, or dynamics. A simple change to the path integral control formulation allows the algorithm to take model uncertainty into account during planning, and we demonstrate its performance on a quadrotor navigation task. In addition to this novel adaptation of path integral control, this is the first time that a receding-horizon implementation of iterative path integral control has been run on a real system.