 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPU Based Path Integral Control with Learned Dynamics
Paper and Code
Mar 01, 2015
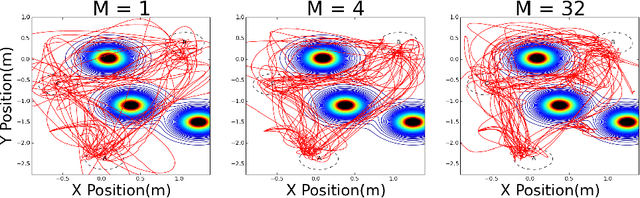

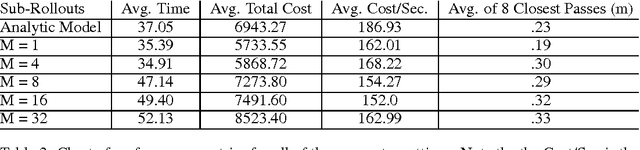
We present an algorithm which combines recent advances in model based path integral control with machine learning approaches to learning forward dynamics models. We take advantage of the parallel computing power of a GPU to quickly take a massive number of samples from a learned probabilistic dynamics model, which we use to approximate the path integral form of the optimal control. The resulting algorithm runs in a receding-horizon fashion in realtime, and is subject to no restrictive assumptions about costs, constraints, or dynamics. A simple change to the path integral control formulation allows the algorithm to take model uncertainty into account during planning, and we demonstrate its performance on a quadrotor navigation task. In addition to this novel adaptation of path integral control, this is the first time that a receding-horizon implementation of iterative path integral control has been run on a real system.