 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBetter Monocular 3D Detectors with LiDAR from the Past
Apr 09, 2024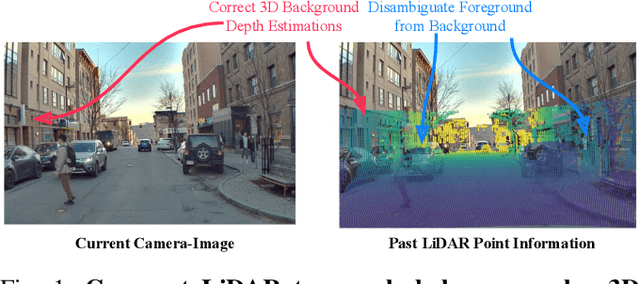
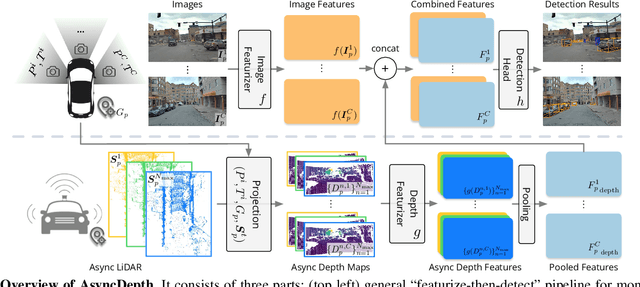
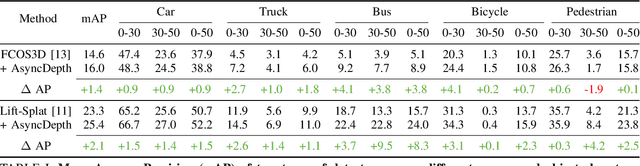
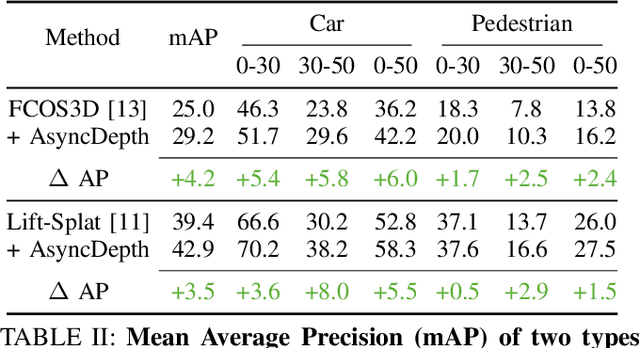
Accurate 3D object detection is crucial to autonomous driving. Though LiDAR-based detectors have achieved impressive performance, the high cost of LiDAR sensors precludes their widespread adoption in affordable vehicles. Camera-based detectors are cheaper alternatives but often suffer inferior performance compared to their LiDAR-based counterparts due to inherent depth ambiguities in images. In this work, we seek to improve monocular 3D detectors by leveraging unlabeled historical LiDAR data. Specifically, at inference time, we assume that the camera-based detectors have access to multiple unlabeled LiDAR scans from past traversals at locations of interest (potentially from other high-end vehicles equipped with LiDAR sensors). Under this setup, we proposed a novel, simple, and end-to-end trainable framework, termed AsyncDepth, to effectively extract relevant features from asynchronous LiDAR traversals of the same location for monocular 3D detectors. We show consistent and significant performance gain (up to 9 AP) across multiple state-of-the-art models and datasets with a negligible additional latency of 9.66 ms and a small storage cost.
Exploiting Playbacks in Unsupervised Domain Adaptation for 3D Object Detection
Mar 26, 2021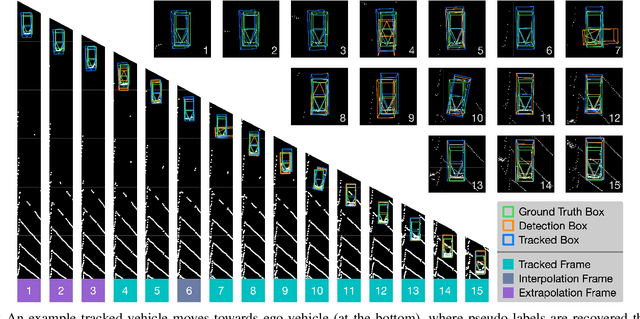
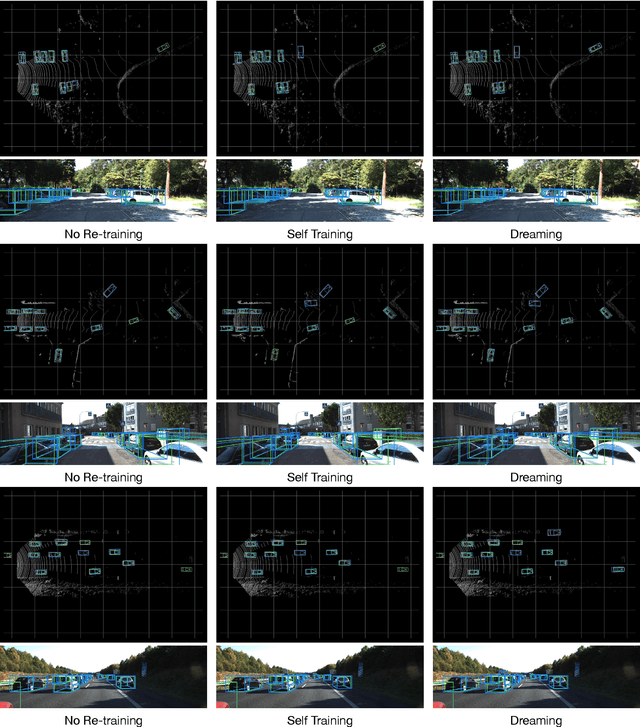
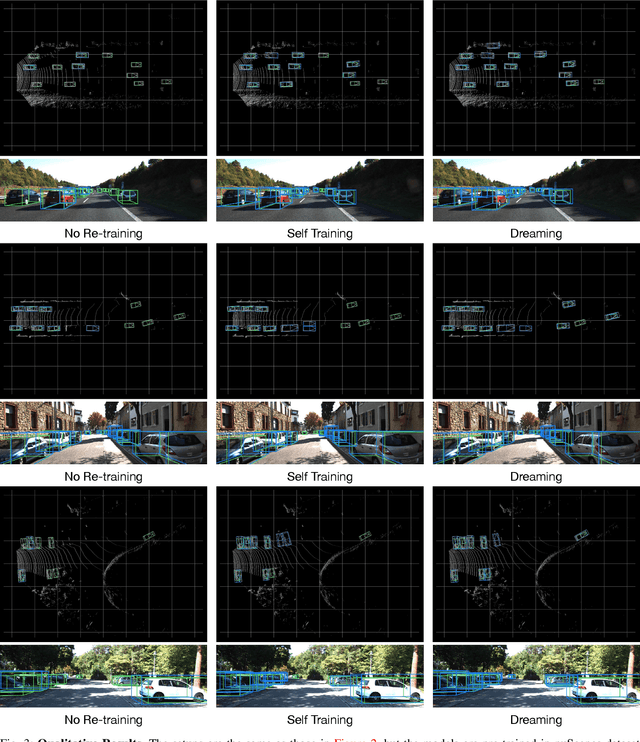
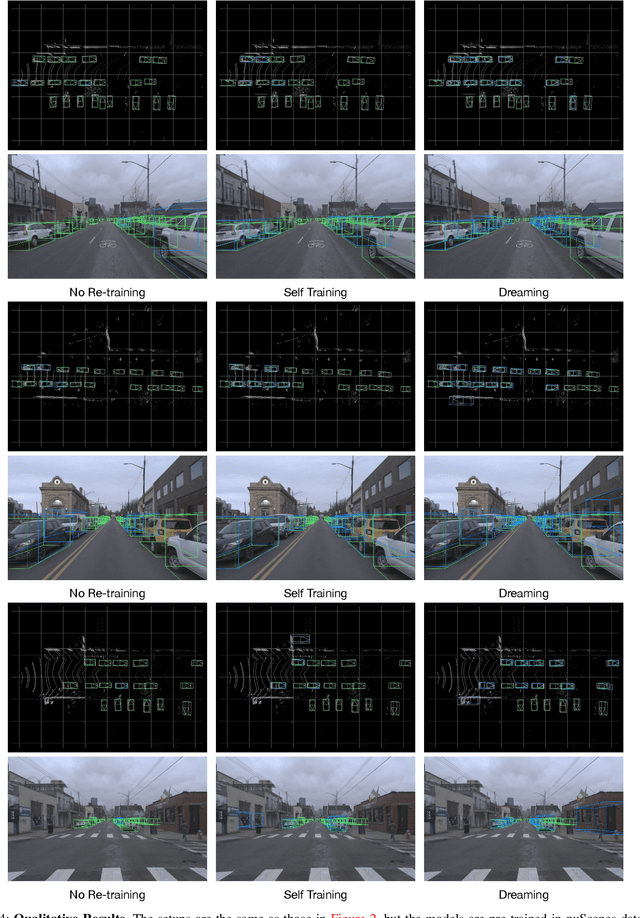
Self-driving cars must detect other vehicles and pedestrians in 3D to plan safe routes and avoid collisions. State-of-the-art 3D object detectors, based on deep learning, have shown promising accuracy but are prone to over-fit to domain idiosyncrasies, making them fail in new environments -- a serious problem if autonomous vehicles are meant to operate freely. In this paper, we propose a novel learning approach that drastically reduces this gap by fine-tuning the detector on pseudo-labels in the target domain, which our method generates while the vehicle is parked, based on replays of previously recorded driving sequences. In these replays, objects are tracked over time, and detections are interpolated and extrapolated -- crucially, leveraging future information to catch hard cases. We show, on five autonomous driving datasets, that fine-tuning the object detector on these pseudo-labels substantially reduces the domain gap to new driving environments, yielding drastic improvements in accuracy and detection reliability.