 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Learning of Abstract Plan Feasibility
Jul 01, 2021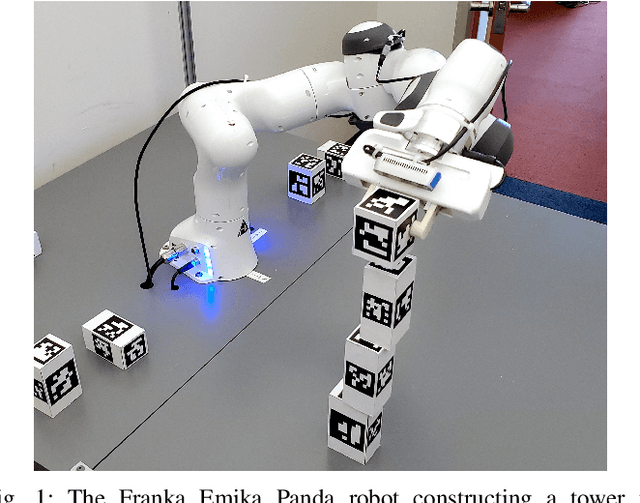
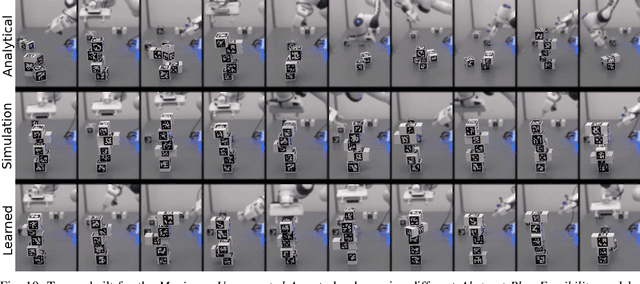
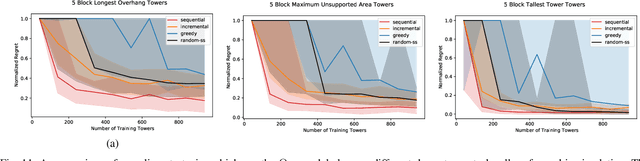
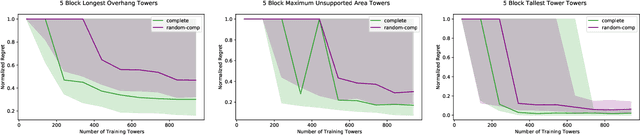
Long horizon sequential manipulation tasks are effectively addressed hierarchically: at a high level of abstraction the planner searches over abstract action sequences, and when a plan is found, lower level motion plans are generated. Such a strategy hinges on the ability to reliably predict that a feasible low level plan will be found which satisfies the abstract plan. However, computing Abstract Plan Feasibility (APF) is difficult because the outcome of a plan depends on real-world phenomena that are difficult to model, such as noise in estimation and execution. In this work, we present an active learning approach to efficiently acquire an APF predictor through task-independent, curious exploration on a robot. The robot identifies plans whose outcomes would be informative about APF, executes those plans, and learns from their successes or failures. Critically, we leverage an infeasible subsequence property to prune candidate plans in the active learning strategy, allowing our system to learn from less data. We evaluate our strategy in simulation and on a real Franka Emika Panda robot with integrated perception, experimentation, planning, and execution. In a stacking domain where objects have non-uniform mass distributions, we show that our system permits real robot learning of an APF model in four hundred self-supervised interactions, and that our learned model can be used effectively in multiple downstream tasks.
Visual Prediction of Priors for Articulated Object Interaction
Jun 06, 2020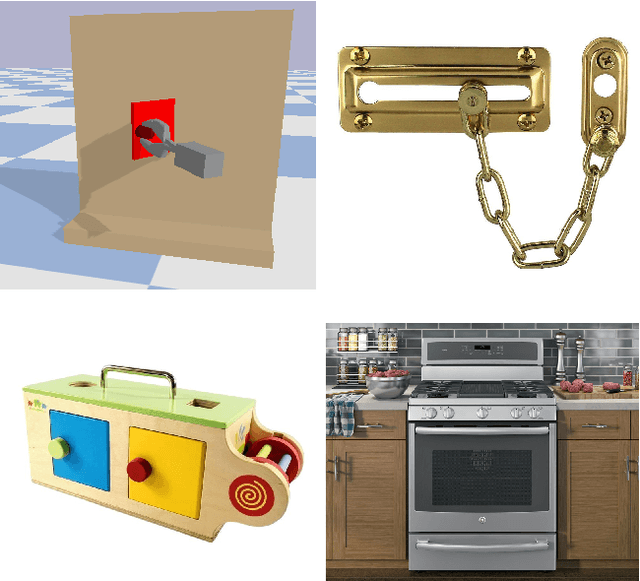

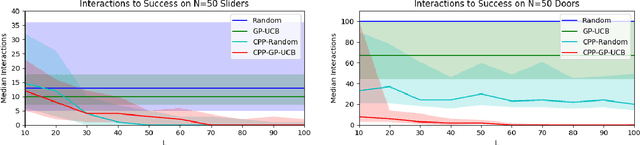
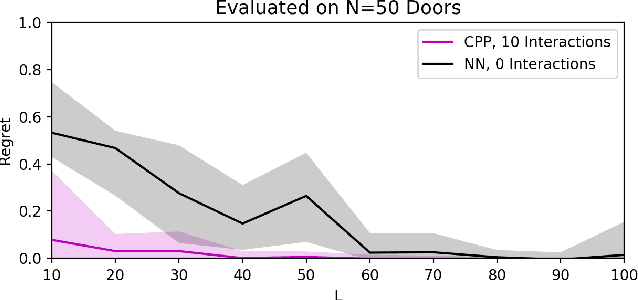
Exploration in novel settings can be challenging without prior experience in similar domains. However, humans are able to build on prior experience quickly and efficiently. Children exhibit this behavior when playing with toys. For example, given a toy with a yellow and blue door, a child will explore with no clear objective, but once they have discovered how to open the yellow door, they will most likely be able to open the blue door much faster. Adults also exhibit this behavior when entering new spaces such as kitchens. We develop a method, Contextual Prior Prediction, which provides a means of transferring knowledge between interactions in similar domains through vision. We develop agents that exhibit exploratory behavior with increasing efficiency, by learning visual features that are shared across environments, and how they correlate to actions. Our problem is formulated as a Contextual Multi-Armed Bandit where the contexts are images, and the robot has access to a parameterized action space. Given a novel object, the objective is to maximize reward with few interactions. A domain which strongly exhibits correlations between visual features and motion is kinemetically constrained mechanisms. We evaluate our method on simulated prismatic and revolute joints.