 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrawing Inductor Layout with a Reinforcement Learning Agent: Method and Application for VCO Inductors
Feb 25, 2022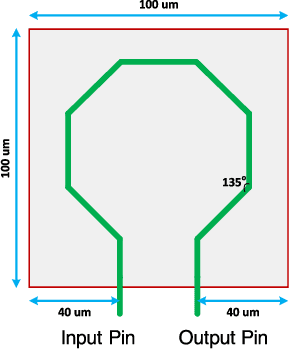
Design of Voltage-Controlled Oscillator (VCO) inductors is a laborious and time-consuming task that is conventionally done manually by human experts. In this paper, we propose a framework for automating the design of VCO inductors, using Reinforcement Learning (RL). We formulate the problem as a sequential procedure, where wire segments are drawn one after another, until a complete inductor is created. We then employ an RL agent to learn to draw inductors that meet certain target specifications. In light of the need to tweak the target specifications throughout the circuit design cycle, we also develop a variant in which the agent can learn to quickly adapt to draw new inductors for moderately different target specifications. Our empirical results show that the proposed framework is successful at automatically generating VCO inductors that meet or exceed the target specification.
Offline Learning of Counterfactual Perception as Prediction for Real-World Robotic Reinforcement Learning
Nov 11, 2020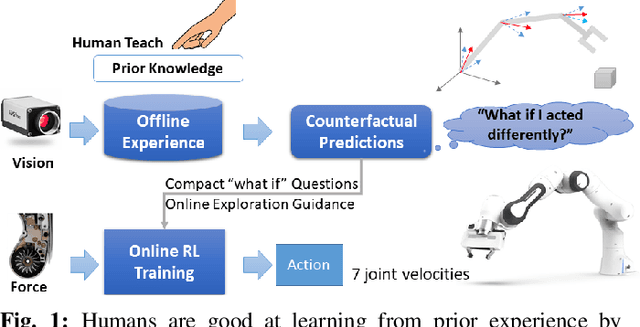
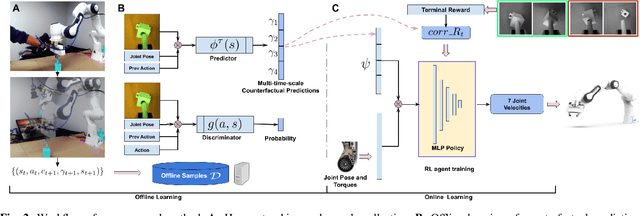
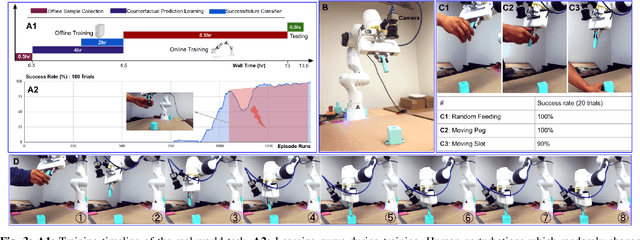
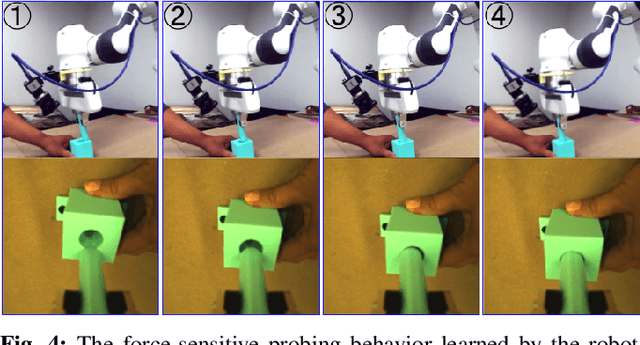
We propose a method for offline learning of counterfactual predictions to address real world robotic reinforcement learning challenges. The proposed method encodes action-oriented visual observations as several "what if" questions learned offline from prior experience using reinforcement learning methods. These "what if" questions counterfactually predict how action-conditioned observation would evolve on multiple temporal scales if the agent were to stick to its current action. We show that combining these offline counterfactual predictions along with online in-situ observations (e.g. force feedback) allows efficient policy learning with only a sparse terminal (success/failure) reward. We argue that the learned predictions form an effective representation of the visual task, and guide the online exploration towards high-potential success interactions (e.g. contact-rich regions). Experiments were conducted in both simulation and real-world scenarios for evaluation. Our results demonstrate that it is practical to train a reinforcement learning agent to perform real-world fine manipulation in about half a day, without hand engineered perception systems or calibrated instrumentation. Recordings of the real robot training can be found via https://sites.google.com/view/realrl.