 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTSEC: a framework for online experimentation under experimental constraints
Jan 17, 2021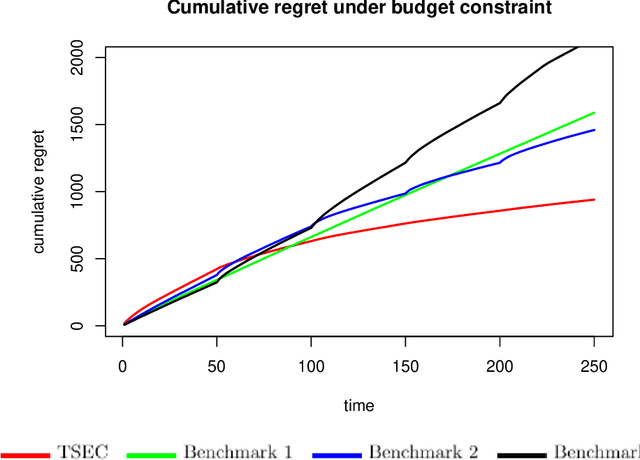
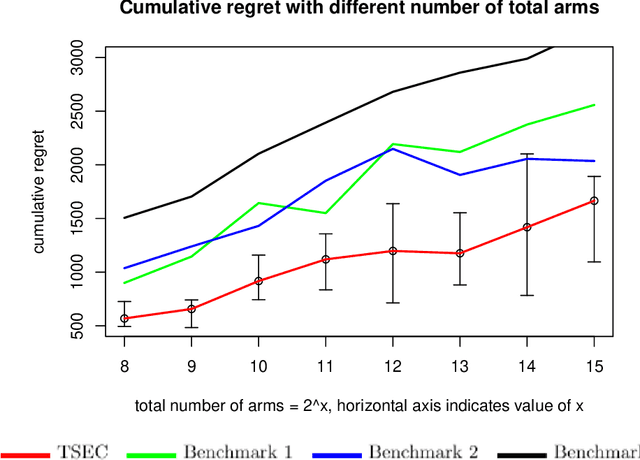
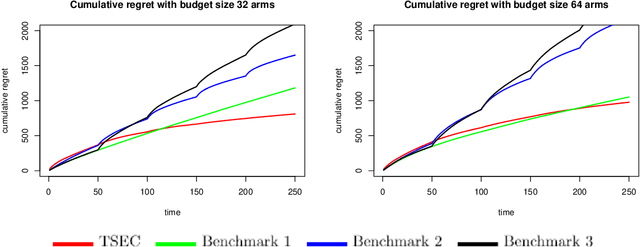
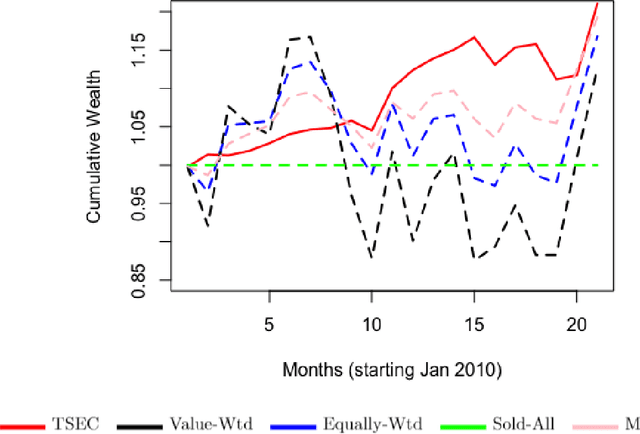
Thompson sampling is a popular algorithm for solving multi-armed bandit problems, and has been applied in a wide range of applications, from website design to portfolio optimization. In such applications, however, the number of choices (or arms) $N$ can be large, and the data needed to make adaptive decisions require expensive experimentation. One is then faced with the constraint of experimenting on only a small subset of $K \ll N$ arms within each time period, which poses a problem for traditional Thompson sampling. We propose a new Thompson Sampling under Experimental Constraints (TSEC) method, which addresses this so-called "arm budget constraint". TSEC makes use of a Bayesian interaction model with effect hierarchy priors, to model correlations between rewards on different arms. This fitted model is then integrated within Thompson sampling, to jointly identify a good subset of arms for experimentation and to allocate resources over these arms. We demonstrate the effectiveness of TSEC in two problems with arm budget constraints. The first is a simulated website optimization study, where TSEC shows noticeable improvements over industry benchmarks. The second is a portfolio optimization application on industry-based exchange-traded funds, where TSEC provides more consistent and greater wealth accumulation over standard investment strategies.
APIK: Active Physics-Informed Kriging Model with Partial Differential Equations
Dec 22, 2020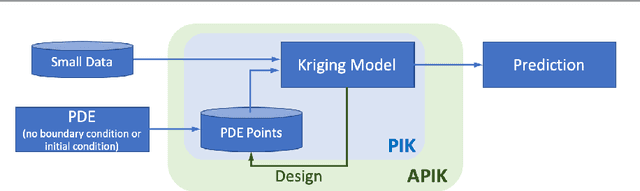
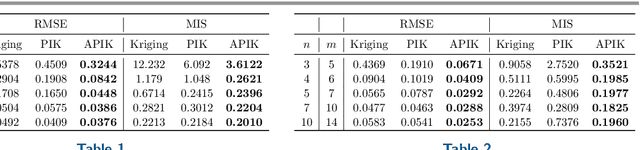


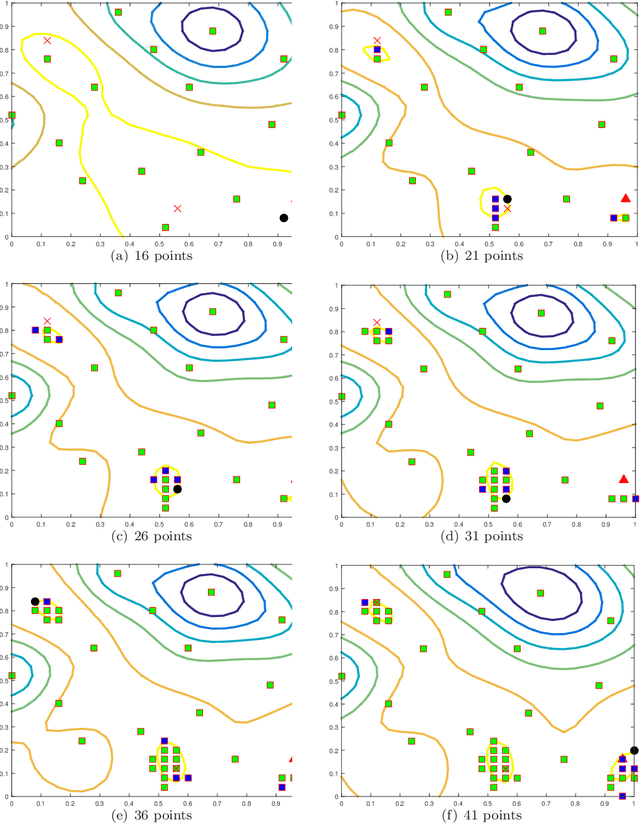
Kriging (or Gaussian process regression) is a popular machine learning method for its flexibility and closed-form prediction expressions. However, one of the key challenges in applying kriging to engineering systems is that the available measurement data is scarce due to the measurement limitations and high sensing costs. On the other hand, physical knowledge of the engineering system is often available and represented in the form of partial differential equations (PDEs). We present in this work a PDE Informed Kriging model (PIK), which introduces PDE information via a set of PDE points and conducts posterior prediction similar to the standard kriging method. The proposed PIK model can incorporate physical knowledge from both linear and nonlinear PDEs. To further improve learning performance, we propose an Active PIK framework (APIK) that designs PDE points to leverage the PDE information based on the PIK model and measurement data. The selected PDE points not only explore the whole input space but also exploit the locations where the PDE information is critical in reducing predictive uncertainty. Finally, an expectation-maximization algorithm is developed for parameter estimation. We demonstrate the effectiveness of APIK in two synthetic examples, a shock wave case study, and a laser heating case study.
Finding Optimal Points for Expensive Functions Using Adaptive RBF-Based Surrogate Model Via Uncertainty Quantification
Jan 19, 2020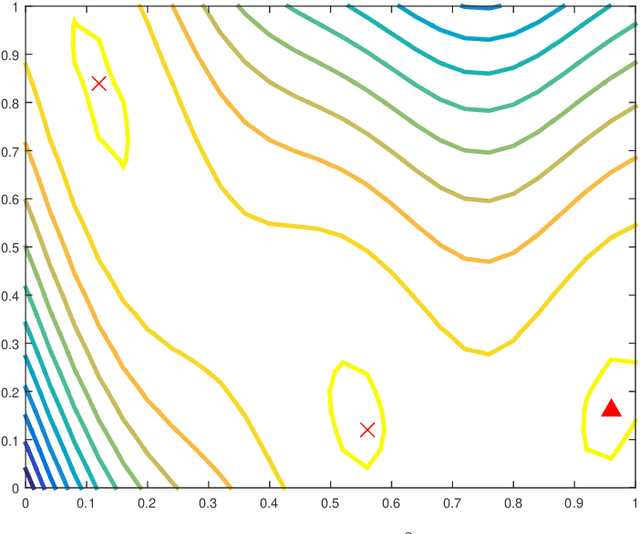


Global optimization of expensive functions has important applications in physical and computer experiments. It is a challenging problem to develop efficient optimization scheme, because each function evaluation can be costly and the derivative information of the function is often not available. We propose a novel global optimization framework using adaptive Radial Basis Functions (RBF) based surrogate model via uncertainty quantification. The framework consists of two iteration steps. It first employs an RBF-based Bayesian surrogate model to approximate the true function, where the parameters of the RBFs can be adaptively estimated and updated each time a new point is explored. Then it utilizes a model-guided selection criterion to identify a new point from a candidate set for function evaluation. The selection criterion adopted here is a sample version of the expected improvement (EI) criterion. We conduct simulation studies with standard test functions, which show that the proposed method has some advantages, especially when the true surface is not very smooth. In addition, we also propose modified approaches to improve the search performance for identifying global optimal points and to deal with the higher dimension scenarios.