 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tutorial on the Non-Asymptotic Theory of System Identification
Sep 07, 2023This tutorial serves as an introduction to recently developed non-asymptotic methods in the theory of -- mainly linear -- system identification. We emphasize tools we deem particularly useful for a range of problems in this domain, such as the covering technique, the Hanson-Wright Inequality and the method of self-normalized martingales. We then employ these tools to give streamlined proofs of the performance of various least-squares based estimators for identifying the parameters in autoregressive models. We conclude by sketching out how the ideas presented herein can be extended to certain nonlinear identification problems.
How Are Learned Perception-Based Controllers Impacted by the Limits of Robust Control?
Apr 02, 2021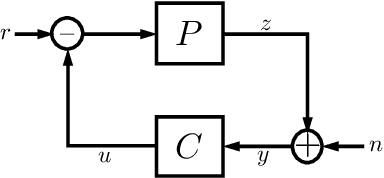
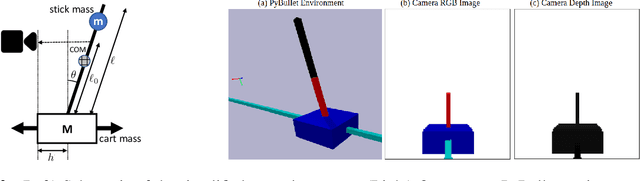


The difficulty of optimal control problems has classically been characterized in terms of system properties such as minimum eigenvalues of controllability/observability gramians. We revisit these characterizations in the context of the increasing popularity of data-driven techniques like reinforcement learning (RL), and in control settings where input observations are high-dimensional images and transition dynamics are unknown. Specifically, we ask: to what extent are quantifiable control and perceptual difficulty metrics of a task predictive of the performance and sample complexity of data-driven controllers? We modulate two different types of partial observability in a cartpole "stick-balancing" problem -- (i) the height of one visible fixation point on the cartpole, which can be used to tune fundamental limits of performance achievable by any controller, and by (ii) the level of perception noise in the fixation point position inferred from depth or RGB images of the cartpole. In these settings, we empirically study two popular families of controllers: RL and system identification-based $H_\infty$ control, using visually estimated system state. Our results show that the fundamental limits of robust control have corresponding implications for the sample-efficiency and performance of learned perception-based controllers. Visit our project website https://jxu.ai/rl-vs-control-web for more information.