 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards developing a realistic robotics simulation environment of an indoor vegetable greenhouse
Jul 29, 2021
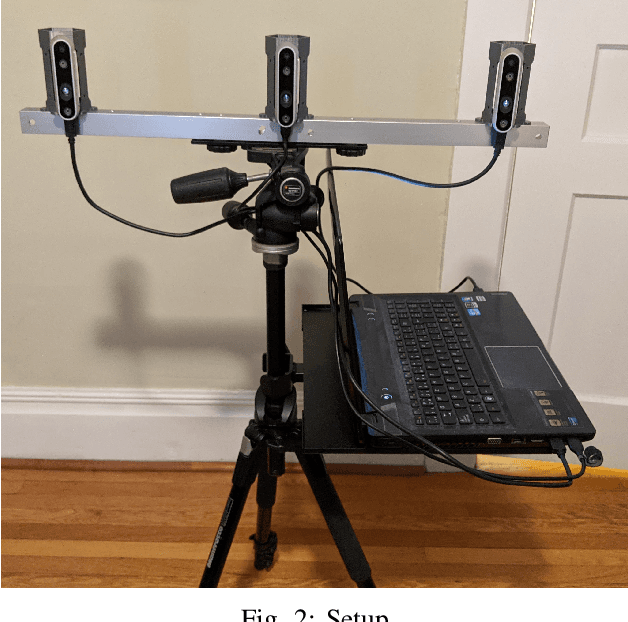
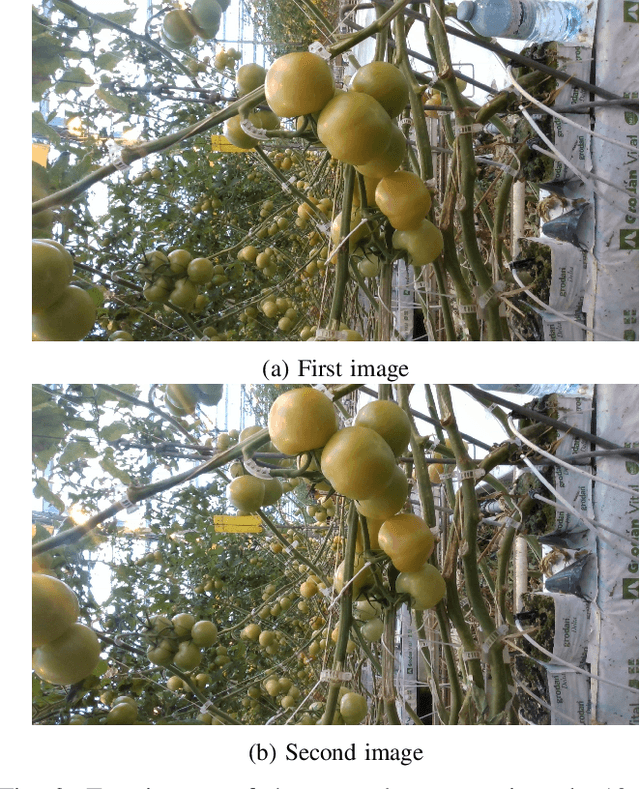
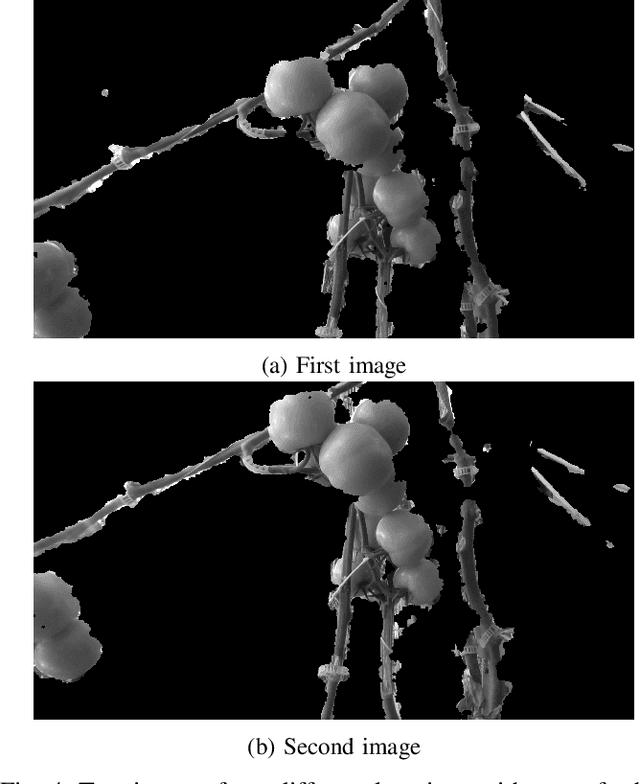
This article presents a method for developing a realistic robotics simulation environment for application in vegetable greenhouses. The method pipeline starts with the construction of a 3D cloud images of the greenhouse rows. This data is then used to develop a robotics simulation environment using the CoppeliaSim simulation software. The method has been tested using images from a commercial greenhouse.
Applying the Wizard-of-Oz Technique to Multimodal Human-Robot Dialogue
Mar 10, 2017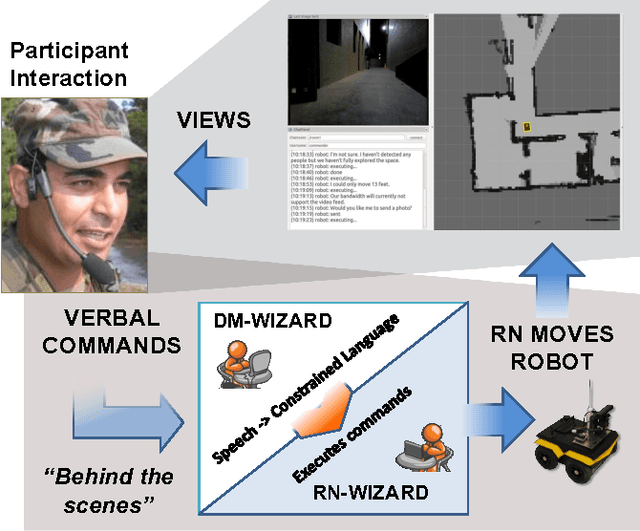
Our overall program objective is to provide more natural ways for soldiers to interact and communicate with robots, much like how soldiers communicate with other soldiers today. We describe how the Wizard-of-Oz (WOz) method can be applied to multimodal human-robot dialogue in a collaborative exploration task. While the WOz method can help design robot behaviors, traditional approaches place the burden of decisions on a single wizard. In this work, we consider two wizards to stand in for robot navigation and dialogue management software components. The scenario used to elicit data is one in which a human-robot team is tasked with exploring an unknown environment: a human gives verbal instructions from a remote location and the robot follows them, clarifying possible misunderstandings as needed via dialogue. We found the division of labor between wizards to be workable, which holds promise for future software development.