Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards developing a realistic robotics simulation environment of an indoor vegetable greenhouse
Jul 29, 2021
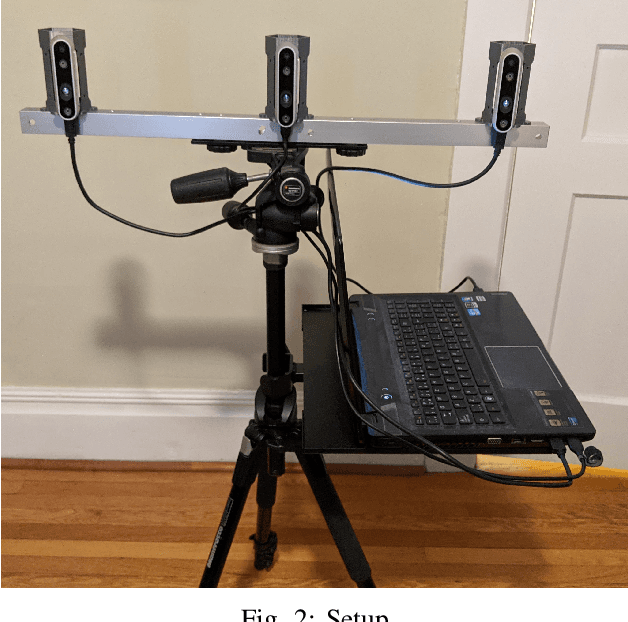
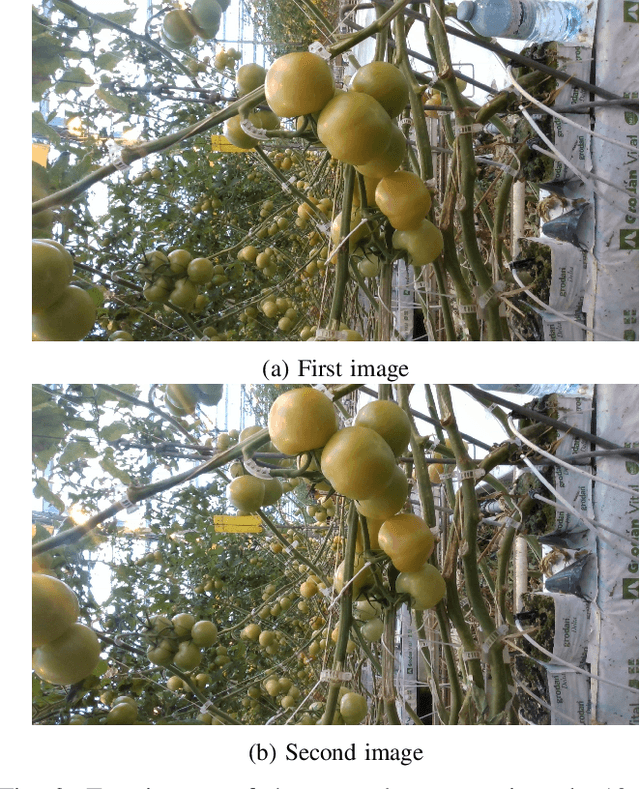
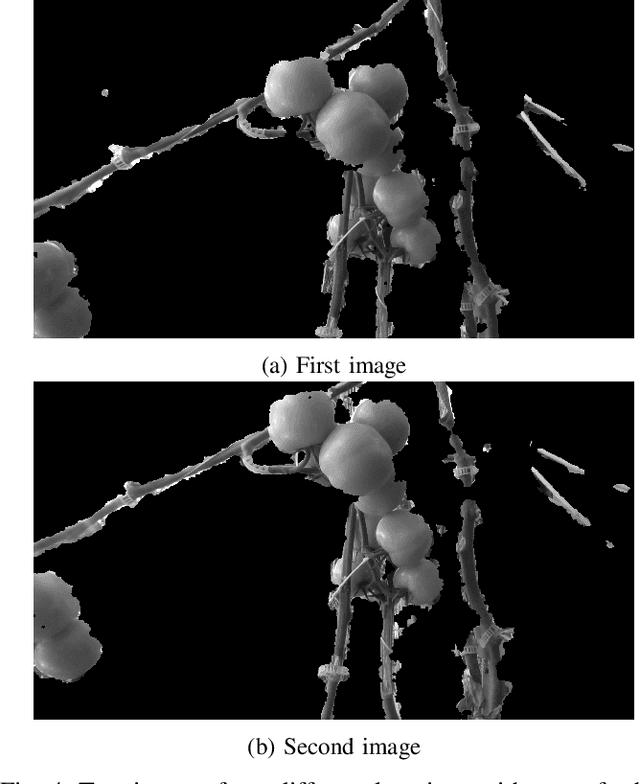
This article presents a method for developing a realistic robotics simulation environment for application in vegetable greenhouses. The method pipeline starts with the construction of a 3D cloud images of the greenhouse rows. This data is then used to develop a robotics simulation environment using the CoppeliaSim simulation software. The method has been tested using images from a commercial greenhouse.
Via