 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Robotic Assembly: From Part Singulation to Precise Assembly
Jun 11, 2024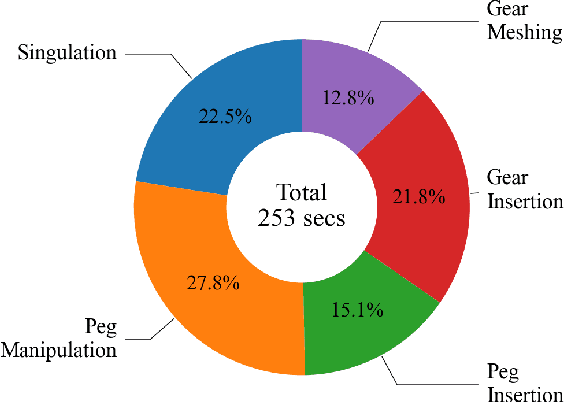
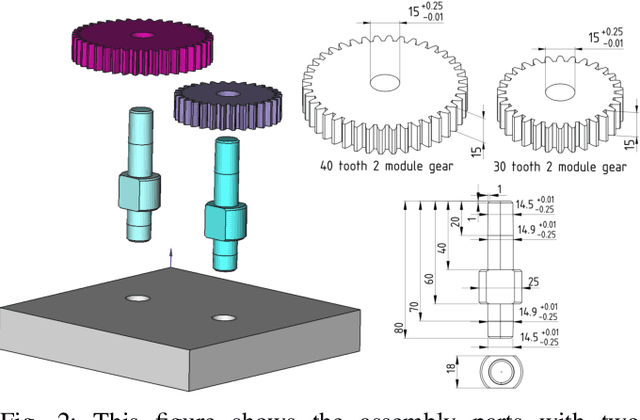

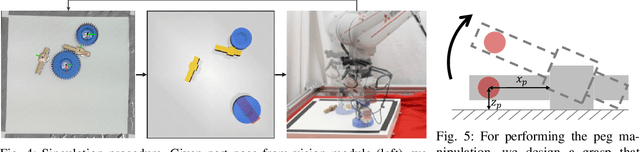
Imagine a robot that can assemble a functional product from the individual parts presented in any configuration to the robot. Designing such a robotic system is a complex problem which presents several open challenges. To bypass these challenges, the current generation of assembly systems is built with a lot of system integration effort to provide the structure and precision necessary for assembly. These systems are mostly responsible for part singulation, part kitting, and part detection, which is accomplished by intelligent system design. In this paper, we present autonomous assembly of a gear box with minimum requirements on structure. The assembly parts are randomly placed in a two-dimensional work environment for the robot. The proposed system makes use of several different manipulation skills such as sliding for grasping, in-hand manipulation, and insertion to assemble the gear box. All these tasks are run in a closed-loop fashion using vision, tactile, and Force-Torque (F/T) sensors. We perform extensive hardware experiments to show the robustness of the proposed methods as well as the overall system. See supplementary video at https://www.youtube.com/watch?v=cZ9M1DQ23OI.
Model-Based Reinforcement Learning for Physical Systems Without Velocity and Acceleration Measurements
Feb 25, 2020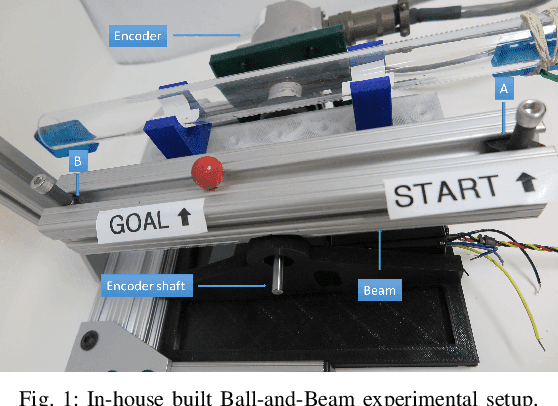
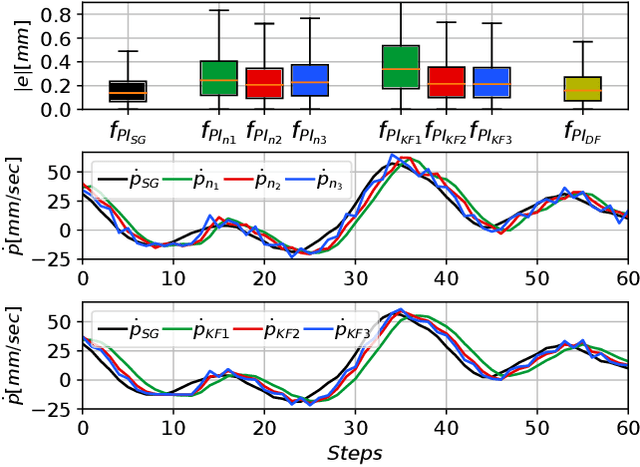
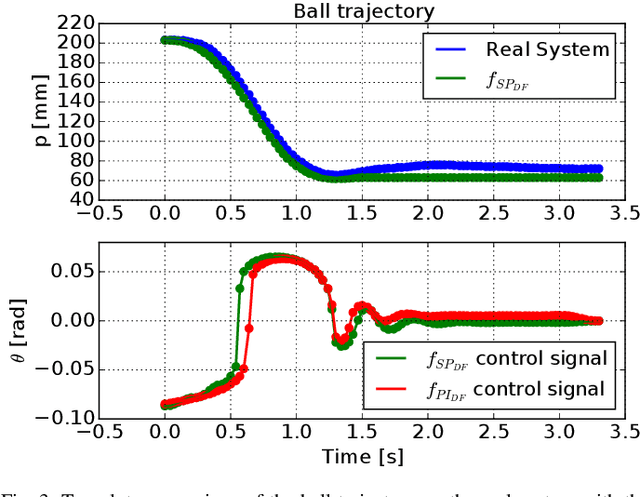
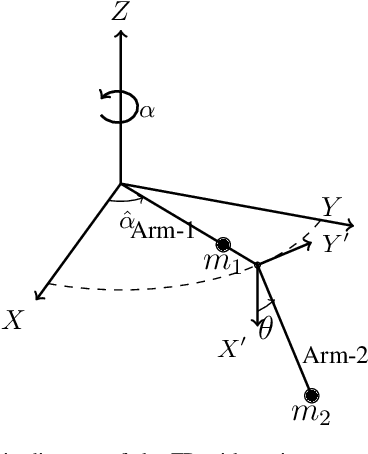
In this paper, we propose a derivative-free model learning framework for Reinforcement Learning (RL) algorithms based on Gaussian Process Regression (GPR). In many mechanical systems, only positions can be measured by the sensing instruments. Then, instead of representing the system state as suggested by the physics with a collection of positions, velocities, and accelerations, we define the state as the set of past position measurements. However, the equation of motions derived by physical first principles cannot be directly applied in this framework, being functions of velocities and accelerations. For this reason, we introduce a novel derivative-free physically-inspired kernel, which can be easily combined with nonparametric derivative-free Gaussian Process models. Tests performed on two real platforms show that the considered state definition combined with the proposed model improves estimation performance and data-efficiency w.r.t. traditional models based on GPR. Finally, we validate the proposed framework by solving two RL control problems for two real robotic systems.