 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Does Flow Matching Bring To TD Learning?
Mar 04, 2026Recent work shows that flow matching can be effective for scalar Q-value function estimation in reinforcement learning (RL), but it remains unclear why or how this approach differs from standard critics. Contrary to conventional belief, we show that their success is not explained by distributional RL, as explicitly modeling return distributions can reduce performance. Instead, we argue that the use of integration for reading out values and dense velocity supervision at each step of this integration process for training improves TD learning via two mechanisms. First, it enables robust value prediction through \emph{test-time recovery}, whereby iterative computation through integration dampens errors in early value estimates as more integration steps are performed. This recovery mechanism is absent in monolithic critics. Second, supervising the velocity field at multiple interpolant values induces more \emph{plastic} feature learning within the network, allowing critics to represent non-stationary TD targets without discarding previously learned features or overfitting to individual TD targets encountered during training. We formalize these effects and validate them empirically, showing that flow-matching critics substantially outperform monolithic critics (2$\times$ in final performance and around 5$\times$ in sample efficiency) in settings where loss of plasticity poses a challenge e.g., in high-UTD online RL problems, while remaining stable during learning.
From Stability to Chaos: Analyzing Gradient Descent Dynamics in Quadratic Regression
Oct 02, 2023



We conduct a comprehensive investigation into the dynamics of gradient descent using large-order constant step-sizes in the context of quadratic regression models. Within this framework, we reveal that the dynamics can be encapsulated by a specific cubic map, naturally parameterized by the step-size. Through a fine-grained bifurcation analysis concerning the step-size parameter, we delineate five distinct training phases: (1) monotonic, (2) catapult, (3) periodic, (4) chaotic, and (5) divergent, precisely demarcating the boundaries of each phase. As illustrations, we provide examples involving phase retrieval and two-layer neural networks employing quadratic activation functions and constant outer-layers, utilizing orthogonal training data. Our simulations indicate that these five phases also manifest with generic non-orthogonal data. We also empirically investigate the generalization performance when training in the various non-monotonic (and non-divergent) phases. In particular, we observe that performing an ergodic trajectory averaging stabilizes the test error in non-monotonic (and non-divergent) phases.
DISeR: Designing Imaging Systems with Reinforcement Learning
Sep 25, 2023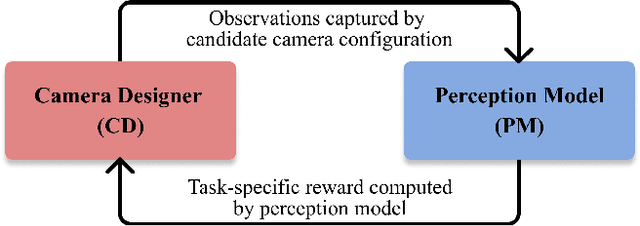
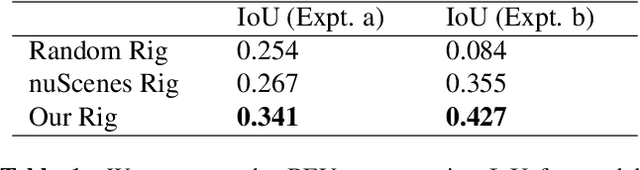
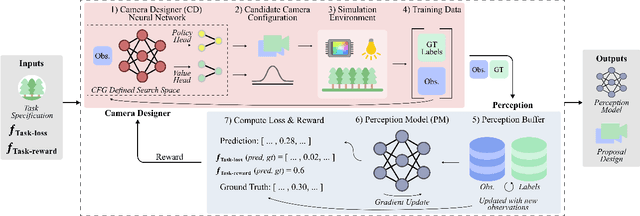
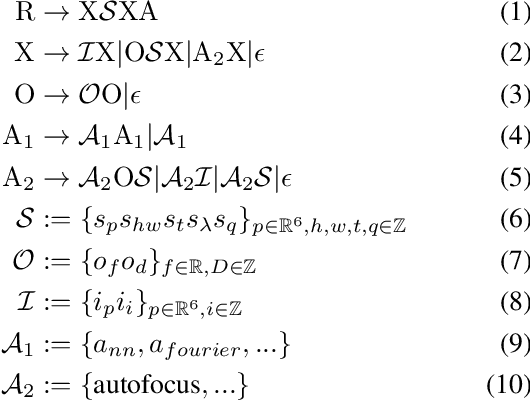
Imaging systems consist of cameras to encode visual information about the world and perception models to interpret this encoding. Cameras contain (1) illumination sources, (2) optical elements, and (3) sensors, while perception models use (4) algorithms. Directly searching over all combinations of these four building blocks to design an imaging system is challenging due to the size of the search space. Moreover, cameras and perception models are often designed independently, leading to sub-optimal task performance. In this paper, we formulate these four building blocks of imaging systems as a context-free grammar (CFG), which can be automatically searched over with a learned camera designer to jointly optimize the imaging system with task-specific perception models. By transforming the CFG to a state-action space, we then show how the camera designer can be implemented with reinforcement learning to intelligently search over the combinatorial space of possible imaging system configurations. We demonstrate our approach on two tasks, depth estimation and camera rig design for autonomous vehicles, showing that our method yields rigs that outperform industry-wide standards. We believe that our proposed approach is an important step towards automating imaging system design.
High-dimensional Central Limit Theorems for Linear Functionals of Online Least-Squares SGD
Feb 20, 2023Stochastic gradient descent (SGD) has emerged as the quintessential method in a data scientist's toolbox. Much progress has been made in the last two decades toward understanding the iteration complexity of SGD (in expectation and high-probability) in the learning theory and optimization literature. However, using SGD for high-stakes applications requires careful quantification of the associated uncertainty. Toward that end, in this work, we establish high-dimensional Central Limit Theorems (CLTs) for linear functionals of online least-squares SGD iterates under a Gaussian design assumption. Our main result shows that a CLT holds even when the dimensionality is of order exponential in the number of iterations of the online SGD, thereby enabling high-dimensional inference with online SGD. Our proof technique involves leveraging Berry-Esseen bounds developed for martingale difference sequences and carefully evaluating the required moment and quadratic variation terms through recent advances in concentration inequalities for product random matrices. We also provide an online approach for estimating the variance appearing in the CLT (required for constructing confidence intervals in practice) and establish consistency results in the high-dimensional setting.