 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatic and Dynamic Representations for Tactile Contact-Angle Estimation with Event-Based Sensors
Jun 02, 2026Event-based tactile sensing offers low-latency signal acquisition for contact-rich robotic interaction. This paper investigates contact-angle estimation using event streams from an event-based tactile sensor (NeuroTac) and compares three event-derived spatial contour representations: a dynamic representation capturing recent event activity, a static representation recovering a more persistent contact state, and their combined representation. Across the evaluated motion scenarios, all representation pipelines exhibited P99 processing latency below 10 ms at all tested sampling intervals, demonstrating their potential for high-frequency event-based tactile angle estimation in robotic manipulation. The static representation consistently achieved marginally better performance than the dynamic and combined representations under scenario-specific training, yielding a mean overall MAE of 0.160° during continuous sensor rolling and a stop-phase mean MAE of 0.251° during randomly inserted motion interruptions. It also exhibited smaller performance fluctuations across speed and indentation depth variations than the other two representations.
Neuromorphic BrailleNet: Accurate and Generalizable Braille Reading Beyond Single Characters through Event-Based Optical Tactile Sensing
Jan 27, 2026Conventional robotic Braille readers typically rely on discrete, character-by-character scanning, limiting reading speed and disrupting natural flow. Vision-based alternatives often require substantial computation, introduce latency, and degrade in real-world conditions. In this work, we present a high accuracy, real-time pipeline for continuous Braille recognition using Evetac, an open-source neuromorphic event-based tactile sensor. Unlike frame-based vision systems, the neuromorphic tactile modality directly encodes dynamic contact events during continuous sliding, closely emulating human finger-scanning strategies. Our approach combines spatiotemporal segmentation with a lightweight ResNet-based classifier to process sparse event streams, enabling robust character recognition across varying indentation depths and scanning speeds. The proposed system achieves near-perfect accuracy (>=98%) at standard depths, generalizes across multiple Braille board layouts, and maintains strong performance under fast scanning. On a physical Braille board containing daily-living vocabulary, the system attains over 90% word-level accuracy, demonstrating robustness to temporal compression effects that challenge conventional methods. These results position neuromorphic tactile sensing as a scalable, low latency solution for robotic Braille reading, with broader implications for tactile perception in assistive and robotic applications.
Exploratory Movement Strategies for Texture Discrimination with a Neuromorphic Tactile Sensor
Sep 18, 2025We propose a neuromorphic tactile sensing framework for robotic texture classification that is inspired by human exploratory strategies. Our system utilizes the NeuroTac sensor to capture neuromorphic tactile data during a series of exploratory motions. We first tested six distinct motions for texture classification under fixed environment: sliding, rotating, tapping, as well as the combined motions: sliding+rotating, tapping+rotating, and tapping+sliding. We chose sliding and sliding+rotating as the best motions based on final accuracy and the sample timing length needed to reach converged accuracy. In the second experiment designed to simulate complex real-world conditions, these two motions were further evaluated under varying contact depth and speeds. Under these conditions, our framework attained the highest accuracy of 87.33\% with sliding+rotating while maintaining an extremely low power consumption of only 8.04 mW. These results suggest that the sliding+rotating motion is the optimal exploratory strategy for neuromorphic tactile sensing deployment in texture classification tasks and holds significant promise for enhancing robotic environmental interaction.
A Neuromorphic Incipient Slip Detection System using Papillae Morphology
Sep 11, 2025Detecting incipient slip enables early intervention to prevent object slippage and enhance robotic manipulation safety. However, deploying such systems on edge platforms remains challenging, particularly due to energy constraints. This work presents a neuromorphic tactile sensing system based on the NeuroTac sensor with an extruding papillae-based skin and a spiking convolutional neural network (SCNN) for slip-state classification. The SCNN model achieves 94.33% classification accuracy across three classes (no slip, incipient slip, and gross slip) in slip conditions induced by sensor motion. Under the dynamic gravity-induced slip validation conditions, after temporal smoothing of the SCNN's final-layer spike counts, the system detects incipient slip at least 360 ms prior to gross slip across all trials, consistently identifying incipient slip before gross slip occurs. These results demonstrate that this neuromorphic system has stable and responsive incipient slip detection capability.
Encoding Tactile Stimuli for Organoid Intelligence in Braille Recognition
Aug 28, 2025This study proposes a generalizable encoding strategy that maps tactile sensor data to electrical stimulation patterns, enabling neural organoids to perform an open-loop artificial tactile Braille classification task. Human forebrain organoids cultured on a low-density microelectrode array (MEA) are systematically stimulated to characterize the relationship between electrical stimulation parameters (number of pulse, phase amplitude, phase duration, and trigger delay) and organoid responses, measured as spike activity and spatial displacement of the center of activity. Implemented on event-based tactile inputs recorded from the Evetac sensor, our system achieved an average Braille letter classification accuracy of 61 percent with a single organoid, which increased significantly to 83 percent when responses from a three-organoid ensemble were combined. Additionally, the multi-organoid configuration demonstrated enhanced robustness against various types of artificially introduced noise. This research demonstrates the potential of organoids as low-power, adaptive bio-hybrid computational elements and provides a foundational encoding framework for future scalable bio-hybrid computing architectures.
Optimal Spiking Brain Compression: Improving One-Shot Post-Training Pruning and Quantization for Spiking Neural Networks
Jun 04, 2025



Spiking Neural Networks (SNNs) have emerged as a new generation of energy-efficient neural networks suitable for implementation on neuromorphic hardware. As neuromorphic hardware has limited memory and computing resources, weight pruning and quantization have recently been explored to improve SNNs' efficiency. State-of-the-art SNN pruning/quantization methods employ multiple compression and training iterations, increasing the cost for pre-trained or very large SNNs. In this paper, we propose a new one-shot post-training pruning/quantization framework, Optimal Spiking Brain Compression (OSBC), that adapts the Optimal Brain Compression (OBC) method of [Frantar, Singh, and Alistarh, 2023] for SNNs. Rather than minimizing the loss on neuron input current as OBC does, OSBC achieves more efficient and accurate SNN compression in one pass by minimizing the loss on spiking neuron membrane potential with a small sample dataset. Our experiments on neuromorphic datasets (N-MNIST, CIFAR10-DVS, DVS128-Gesture) demonstrate that OSBC can achieve 97% sparsity through pruning with 1.41%, 10.20%, and 1.74% accuracy loss, or 4-bit symmetric quantization with 0.17%, 1.54%, and 7.71% accuracy loss, respectively. Code will be available on GitHub.
Towards integrated tactile sensorimotor control in anthropomorphic soft robotic hands
Feb 05, 2021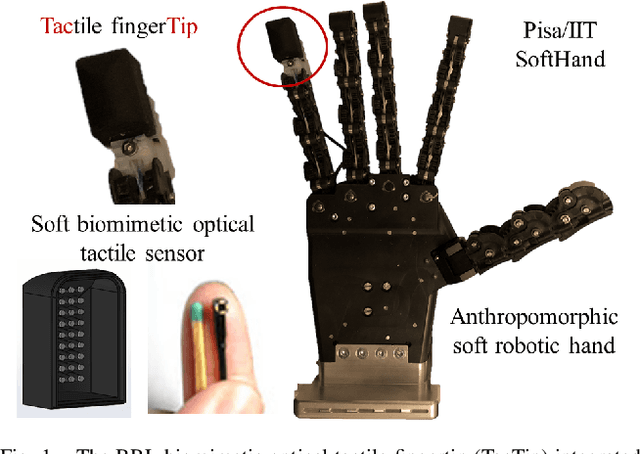
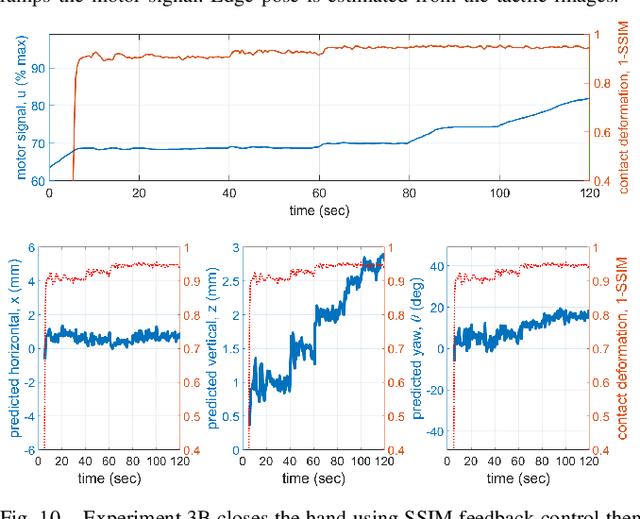
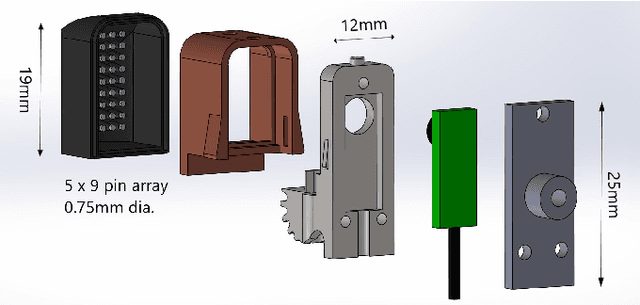
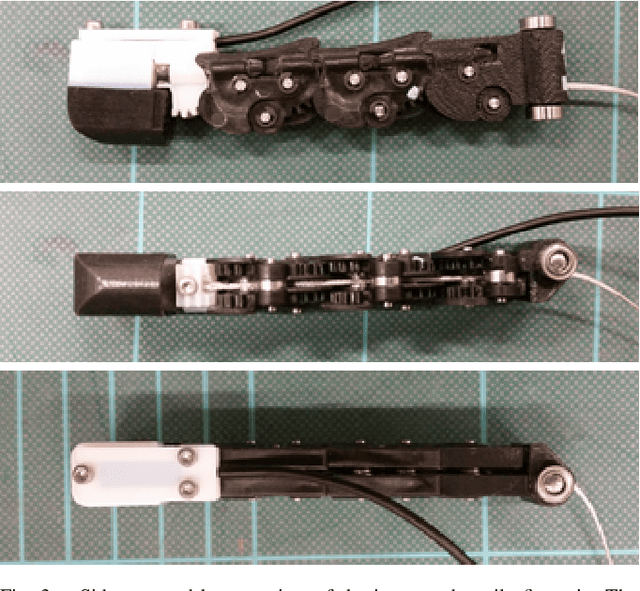
In this work, we report on the integrated sensorimotor control of the Pisa/IIT SoftHand, an anthropomorphic soft robot hand designed around the principle of adaptive synergies, with the BRL tactile fingertip (TacTip), a soft biomimetic optical tactile sensor based on the human sense of touch. Our focus is how a sense of touch can be used to control an anthropomorphic hand with one degree of actuation, based on an integration that respects the hand's mechanical functionality. We consider: (i) closed-loop tactile control to establish a light contact on an unknown held object, based on the structural similarity with an undeformed tactile image; and (ii) controlling the estimated pose of an edge feature of a held object, using a convolutional neural network approach developed for controlling other sensors in the TacTip family. Overall, this gives a foundation to endow soft robotic hands with human-like touch, with implications for autonomous grasping, manipulation, human-robot interaction and prosthetics. Supplemental video: https://youtu.be/ndsxj659bkQ
NeuroTac: A Neuromorphic Optical Tactile Sensor applied to Texture Recognition
Mar 01, 2020
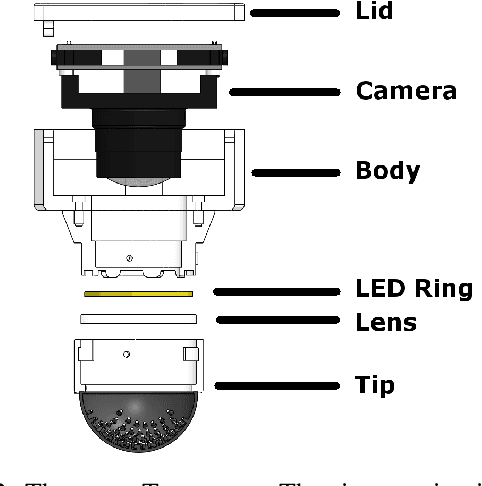

Developing artificial tactile sensing capabilities that rival human touch is a long-term goal in robotics and prosthetics. Gradually more elaborate biomimetic tactile sensors are being developed and applied to grasping and manipulation tasks to help achieve this goal. Here we present the neuroTac, a novel neuromorphic optical tactile sensor. The neuroTac combines the biomimetic hardware design from the TacTip sensor which mimicks the layered papillae structure of human glabrous skin, with an event-based camera (DAVIS240, iniVation) and algorithms which transduce contact information in the form of spike trains. The performance of the sensor is evaluated on a texture classification task, with four spike coding methods being implemented and compared: Intensive, Spatial, Temporal and Spatiotemporal. We found timing-based coding methods performed with the highest accuracy over both artificial and natural textures. The spike-based output of the neuroTac could enable the development of biomimetic tactile perception algorithms in robotics as well as non-invasive and invasive haptic feedback methods in prosthetics.