 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial SA-I, RA-I and RA-II/Vibrotactile Afferents for Tactile Sensing of Texture
Apr 05, 2022



Robot touch can benefit from how humans perceive tactile textural information, from the stimulation mode to which tactile channels respond, then the tactile cues and encoding. Using a soft biomimetic tactile sensor (the TacTip) based on the physiology of the dermal-epidermal boundary, we construct two biomimetic tactile channels based on slowly-adapting SA-I and rapidly-adapting RA-I afferents, and introduce an additional sub-modality for vibrotactile information with an embedded microphone interpreted as an artificial RA-II channel. These artificial tactile channels are stimulated dynamically with a set of 13 artificial rigid textures comprising raised-bump patterns on a rotating drum that vary systematically in roughness. Methods employing spatial, spatio-temporal and temporal codes are assessed for texture classification insensitive to stimulation speed. We find: (i) spatially-encoded frictional cues provide a salient representation of texture; (ii) a simple transformation of spatial tactile features to model natural afferent responses improves the temporal coding; and (iii) the harmonic structure of induced vibrations provides a pertinent code for speed-invariant texture classification. Just as human touch relies on an interplay between slowly-adapting (SA-I), rapidly-adapting (RA-I) and vibrotactile (RA-II) channels, this tripartite structure may be needed for future robot applications with human-like dexterity, from prosthetics to materials testing, handling and manipulation.
Artificial SA-I and RA-I Afferentsfor Tactile Sensing of Ridges and Gratings
Jul 16, 2021



For robot touch to converge with the human sense of touch, artificial transduction should involve biologically-plausible population codes analogous to those of natural afferents. Using a biomimetic tactile sensor with 3d-printed skin based on the dermal-epidermal boundary, we propose two novel feature sets to mimic slowly-adapting and rapidly-adapting type-I tactile mechanoreceptor function. Their plausibility is tested with three classic experiments from the study of natural touch: impingement on a flat plate to probe adaptation and spatial modulation; stimulation by spatially-complex ridged stimuli to probe single afferent responses; and perception of grating orientation to probe the population response. Our results show a match between artificial and natural afferent responses in their sensitivity to edges and gaps; likewise, the human and robot psychometric functions match for grating orientation. These findings could benefit robot manipulation, prosthetics and the neurophysiology of touch.
A robust controller for stable 3D pinching using tactile sensing
Jun 02, 2021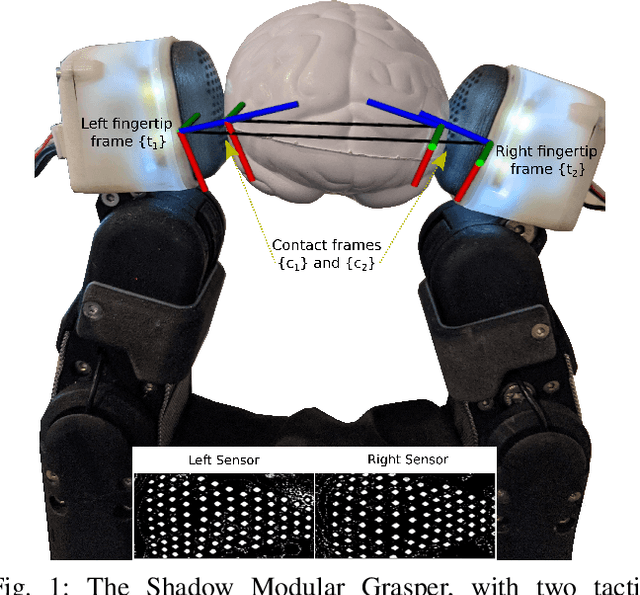
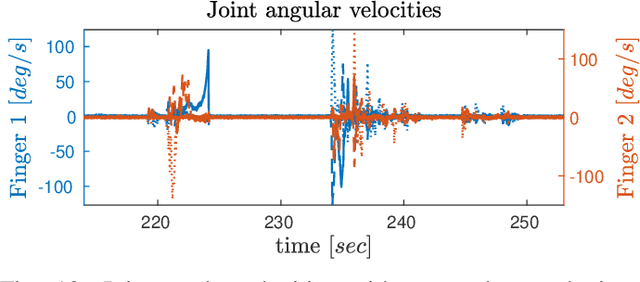
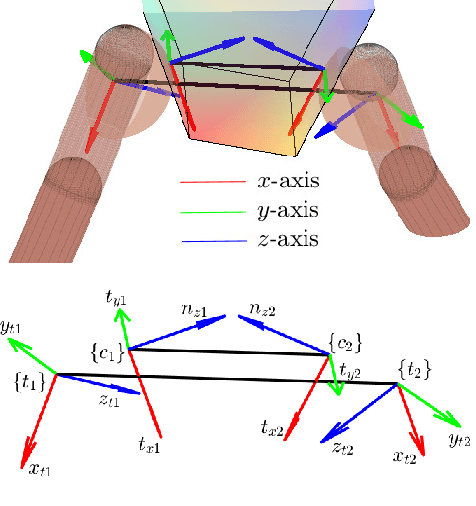
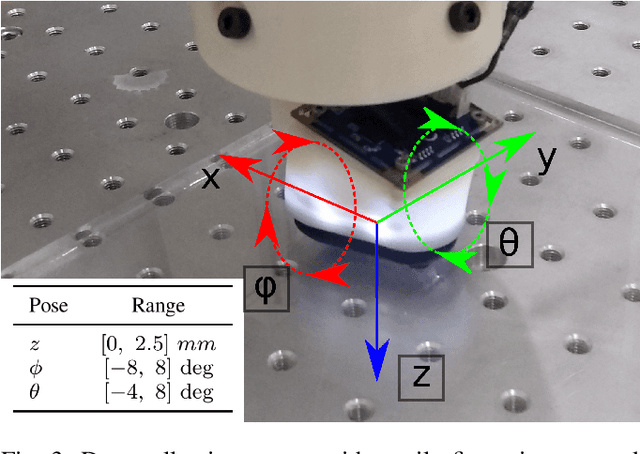
This paper proposes a controller for stable grasping of unknown-shaped objects by two robotic fingers with tactile fingertips. The grasp is stabilised by rolling the fingertips on the contact surface and applying a desired grasping force to reach an equilibrium state. The validation is both in simulation and on a fully-actuated robot hand (the Shadow Modular Grasper) fitted with custom-built optical tactile sensors (based on the BRL TacTip). The controller requires the orientations of the contact surfaces, which are estimated by regressing a deep convolutional neural network over the tactile images. Overall, the grasp system is demonstrated to achieve stable equilibrium poses on a range of objects varying in shape and softness, with the system being robust to perturbations and measurement errors. This approach also has promise to extend beyond grasping to stable in-hand object manipulation with multiple fingers.
NeuroTac: A Neuromorphic Optical Tactile Sensor applied to Texture Recognition
Mar 01, 2020
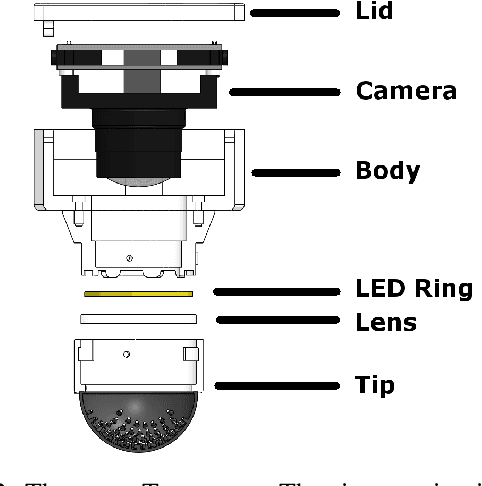

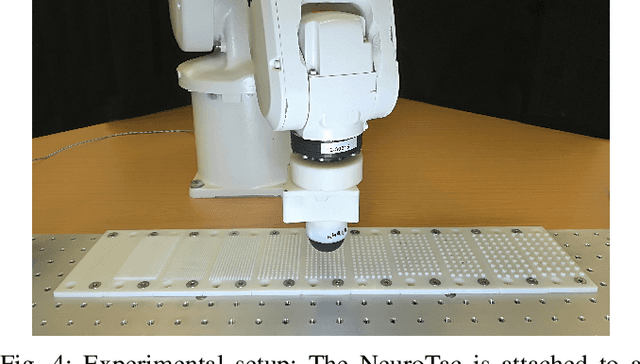
Developing artificial tactile sensing capabilities that rival human touch is a long-term goal in robotics and prosthetics. Gradually more elaborate biomimetic tactile sensors are being developed and applied to grasping and manipulation tasks to help achieve this goal. Here we present the neuroTac, a novel neuromorphic optical tactile sensor. The neuroTac combines the biomimetic hardware design from the TacTip sensor which mimicks the layered papillae structure of human glabrous skin, with an event-based camera (DAVIS240, iniVation) and algorithms which transduce contact information in the form of spike trains. The performance of the sensor is evaluated on a texture classification task, with four spike coding methods being implemented and compared: Intensive, Spatial, Temporal and Spatiotemporal. We found timing-based coding methods performed with the highest accuracy over both artificial and natural textures. The spike-based output of the neuroTac could enable the development of biomimetic tactile perception algorithms in robotics as well as non-invasive and invasive haptic feedback methods in prosthetics.