 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond the Imitation Game: Quantifying and extrapolating the capabilities of language models
Jun 10, 2022Language models demonstrate both quantitative improvement and new qualitative capabilities with increasing scale. Despite their potentially transformative impact, these new capabilities are as yet poorly characterized. In order to inform future research, prepare for disruptive new model capabilities, and ameliorate socially harmful effects, it is vital that we understand the present and near-future capabilities and limitations of language models. To address this challenge, we introduce the Beyond the Imitation Game benchmark (BIG-bench). BIG-bench currently consists of 204 tasks, contributed by 442 authors across 132 institutions. Task topics are diverse, drawing problems from linguistics, childhood development, math, common-sense reasoning, biology, physics, social bias, software development, and beyond. BIG-bench focuses on tasks that are believed to be beyond the capabilities of current language models. We evaluate the behavior of OpenAI's GPT models, Google-internal dense transformer architectures, and Switch-style sparse transformers on BIG-bench, across model sizes spanning millions to hundreds of billions of parameters. In addition, a team of human expert raters performed all tasks in order to provide a strong baseline. Findings include: model performance and calibration both improve with scale, but are poor in absolute terms (and when compared with rater performance); performance is remarkably similar across model classes, though with benefits from sparsity; tasks that improve gradually and predictably commonly involve a large knowledge or memorization component, whereas tasks that exhibit "breakthrough" behavior at a critical scale often involve multiple steps or components, or brittle metrics; social bias typically increases with scale in settings with ambiguous context, but this can be improved with prompting.
Evolving neural networks to follow trajectories of arbitrary complexity
May 21, 2019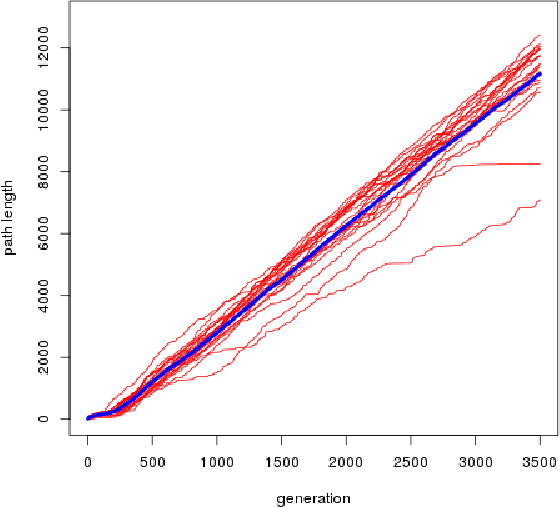
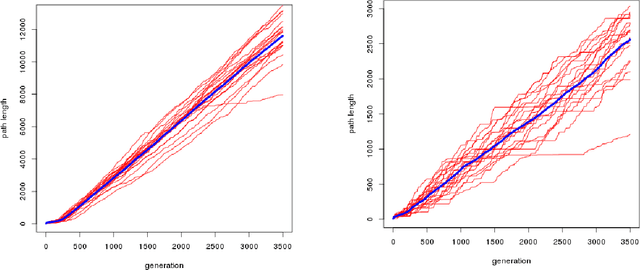
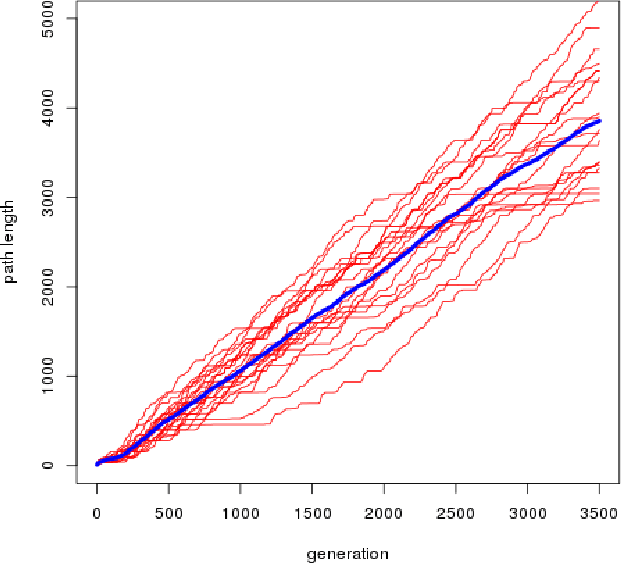
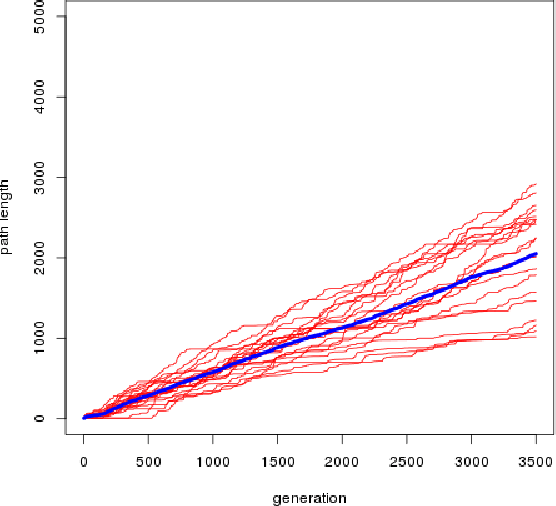
Many experiments have been performed that use evolutionary algorithms for learning the topology and connection weights of a neural network that controls a robot or virtual agent. These experiments are not only performed to better understand basic biological principles, but also with the hope that with further progress of the methods, they will become competitive for automatically creating robot behaviors of interest. However, current methods are limited with respect to the (Kolmogorov) complexity of evolved behavior. Using the evolution of robot trajectories as an example, we show that by adding four features, namely (1) freezing of previously evolved structure, (2) temporal scaffolding, (3) a homogeneous transfer function for output nodes, and (4) mutations that create new pathways to outputs, to standard methods for the evolution of neural networks, we can achieve an approximately linear growth of the complexity of behavior over thousands of generations. Overall, evolved complexity is up to two orders of magnitude over that achieved by standard methods in the experiments reported here, with the major limiting factor for further growth being the available run time. Thus, the set of methods proposed here promises to be a useful addition to various current neuroevolution methods.