 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWho is leading in AI? An analysis of industry AI research
Nov 24, 2023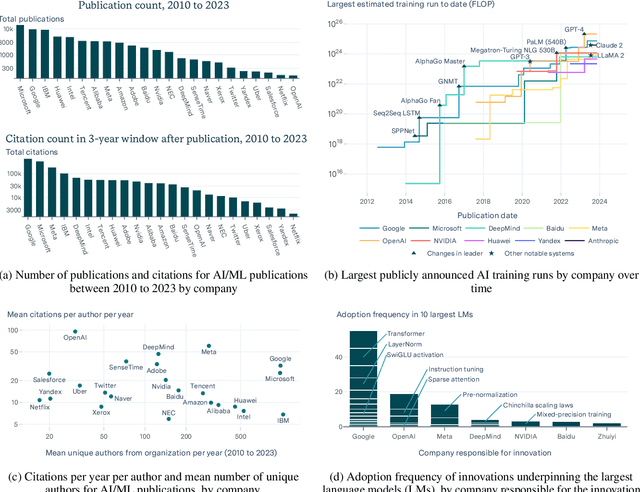
AI research is increasingly industry-driven, making it crucial to understand company contributions to this field. We compare leading AI companies by research publications, citations, size of training runs, and contributions to algorithmic innovations. Our analysis reveals the substantial role played by Google, OpenAI and Meta. We find that these three companies have been responsible for some of the largest training runs, developed a large fraction of the algorithmic innovations that underpin large language models, and led in various metrics of citation impact. In contrast, leading Chinese companies such as Tencent and Baidu had a lower impact on many of these metrics compared to US counterparts. We observe many industry labs are pursuing large training runs, and that training runs from relative newcomers -- such as OpenAI and Anthropic -- have matched or surpassed those of long-standing incumbents such as Google. The data reveals a diverse ecosystem of companies steering AI progress, though US labs such as Google, OpenAI and Meta lead across critical metrics.
Modeling Transformative AI Risks (MTAIR) Project -- Summary Report
Jun 19, 2022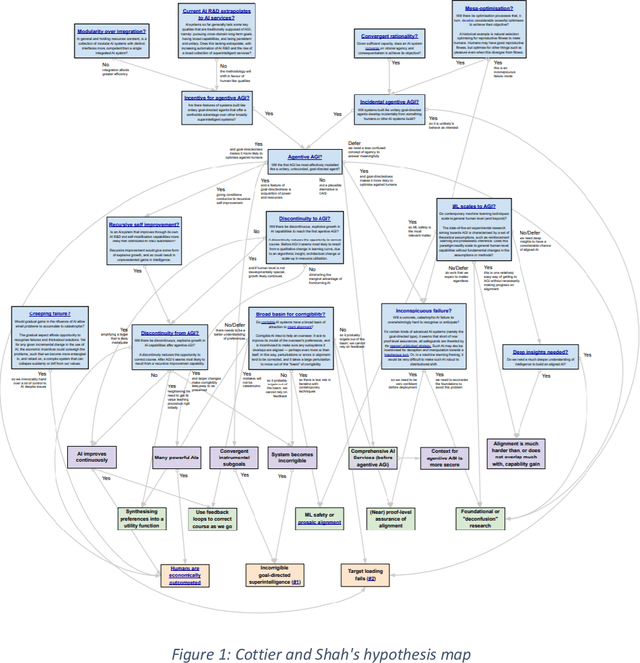
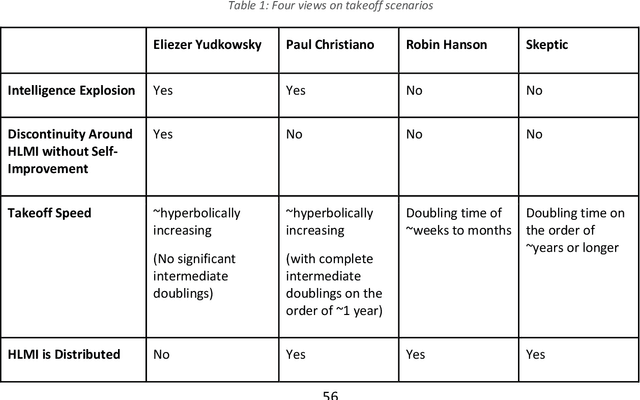
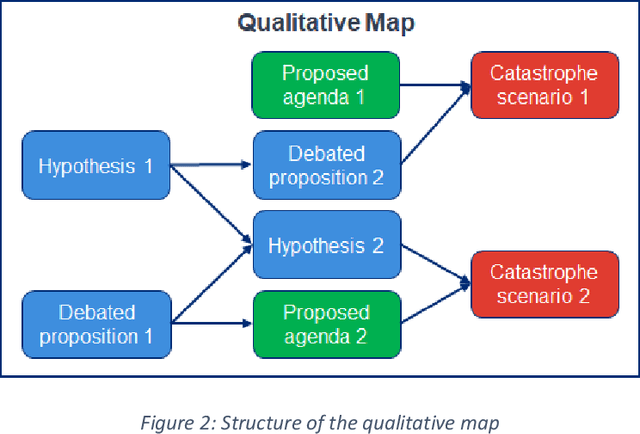
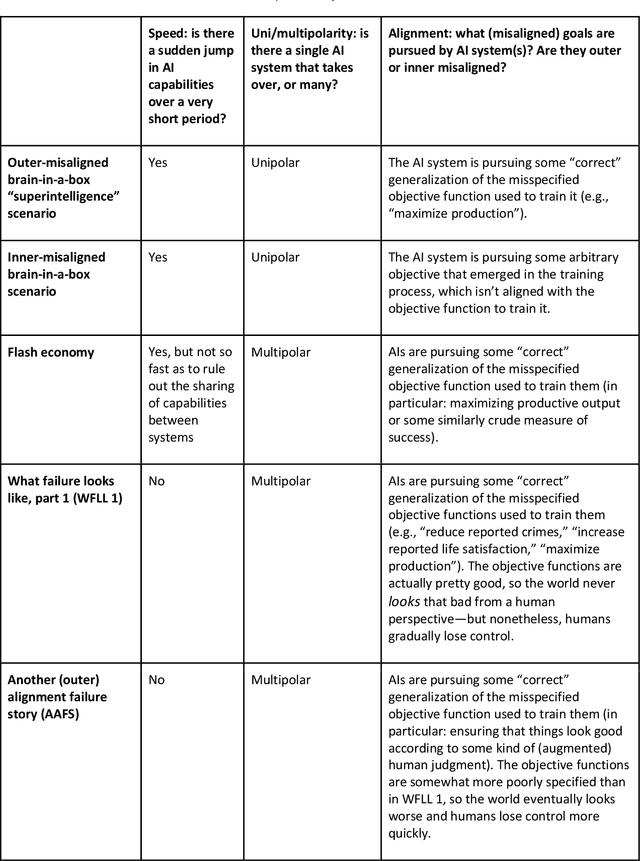
This report outlines work by the Modeling Transformative AI Risk (MTAIR) project, an attempt to map out the key hypotheses, uncertainties, and disagreements in debates about catastrophic risks from advanced AI, and the relationships between them. This builds on an earlier diagram by Ben Cottier and Rohin Shah which laid out some of the crucial disagreements ("cruxes") visually, with some explanation. Based on an extensive literature review and engagement with experts, the report explains a model of the issues involved, and the initial software-based implementation that can incorporate probability estimates or other quantitative factors to enable exploration, planning, and/or decision support. By gathering information from various debates and discussions into a single more coherent presentation, we hope to enable better discussions and debates about the issues involved. The model starts with a discussion of reasoning via analogies and general prior beliefs about artificial intelligence. Following this, it lays out a model of different paths and enabling technologies for high-level machine intelligence, and a model of how advances in the capabilities of these systems might proceed, including debates about self-improvement, discontinuous improvements, and the possibility of distributed, non-agentic high-level intelligence or slower improvements. The model also looks specifically at the question of learned optimization, and whether machine learning systems will create mesa-optimizers. The impact of different safety research on the previous sets of questions is then examined, to understand whether and how research could be useful in enabling safer systems. Finally, we discuss a model of different failure modes and loss of control or takeover scenarios.
Comparing Direct and Indirect Representations for Environment-Specific Robot Component Design
Jan 21, 2019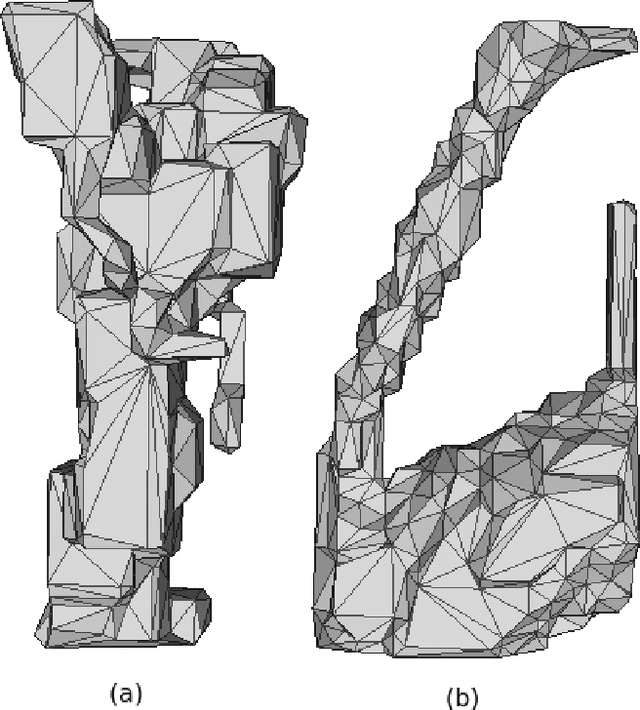
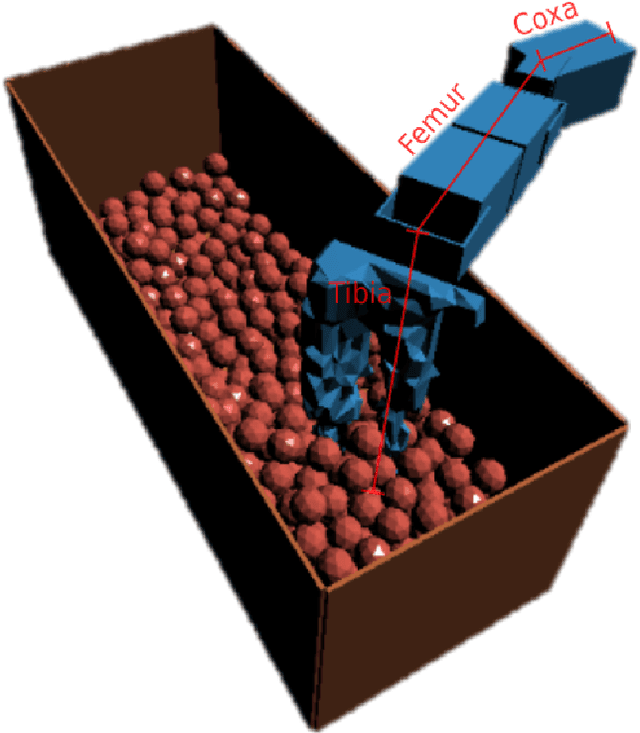
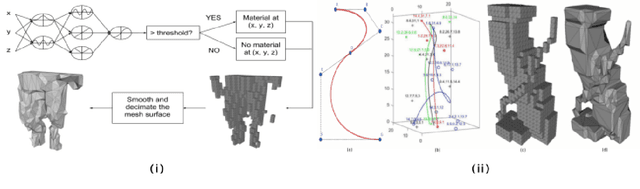
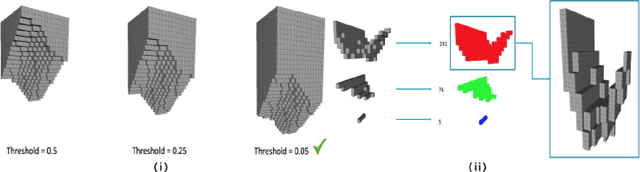
We compare two representations used to define the morphology of legs for a hexapod robot, which are subsequently 3D printed. A leg morphology occupies a set of voxels in a voxel grid. One method, a direct representation, uses a collection of Bezier splines. The second, an indirect method, utilises CPPN-NEAT. In our first experiment, we investigate two strategies to post-process the CPPN output and ensure leg length constraints are met. The first uses an adaptive threshold on the output neuron, the second, previously reported in the literature, scales the largest generated artefact to our desired length. In our second experiment, we build on our past work that evolves the tibia of a hexapod to provide environment-specific performance benefits. We compare the performance of our direct and indirect legs across three distinct environments, represented in a high-fidelity simulator. Results are significant and support our hypothesis that the indirect representation allows for further exploration of the design space leading to improved fitness.