 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-view Surface Reconstruction Using Normal and Reflectance Cues
Jun 04, 2025Achieving high-fidelity 3D surface reconstruction while preserving fine details remains challenging, especially in the presence of materials with complex reflectance properties and without a dense-view setup. In this paper, we introduce a versatile framework that incorporates multi-view normal and optionally reflectance maps into radiance-based surface reconstruction. Our approach employs a pixel-wise joint re-parametrization of reflectance and surface normals, representing them as a vector of radiances under simulated, varying illumination. This formulation enables seamless incorporation into standard surface reconstruction pipelines, such as traditional multi-view stereo (MVS) frameworks or modern neural volume rendering (NVR) ones. Combined with the latter, our approach achieves state-of-the-art performance on multi-view photometric stereo (MVPS) benchmark datasets, including DiLiGenT-MV, LUCES-MV and Skoltech3D. In particular, our method excels in reconstructing fine-grained details and handling challenging visibility conditions. The present paper is an extended version of the earlier conference paper by Brument et al. (in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024), featuring an accelerated and more robust algorithm as well as a broader empirical evaluation. The code and data relative to this article is available at https://github.com/RobinBruneau/RNb-NeuS2.
Acquiring Submillimeter-Accurate Multi-Task Vision Datasets for Computer-Assisted Orthopedic Surgery
Jan 26, 2025Advances in computer vision, particularly in optical image-based 3D reconstruction and feature matching, enable applications like marker-less surgical navigation and digitization of surgery. However, their development is hindered by a lack of suitable datasets with 3D ground truth. This work explores an approach to generating realistic and accurate ex vivo datasets tailored for 3D reconstruction and feature matching in open orthopedic surgery. A set of posed images and an accurately registered ground truth surface mesh of the scene are required to develop vision-based 3D reconstruction and matching methods suitable for surgery. We propose a framework consisting of three core steps and compare different methods for each step: 3D scanning, calibration of viewpoints for a set of high-resolution RGB images, and an optical-based method for scene registration. We evaluate each step of this framework on an ex vivo scoliosis surgery using a pig spine, conducted under real operating room conditions. A mean 3D Euclidean error of 0.35 mm is achieved with respect to the 3D ground truth. The proposed method results in submillimeter accurate 3D ground truths and surgical images with a spatial resolution of 0.1 mm. This opens the door to acquiring future surgical datasets for high-precision applications.
RNb-NeuS: Reflectance and Normal-based Multi-View 3D Reconstruction
Dec 02, 2023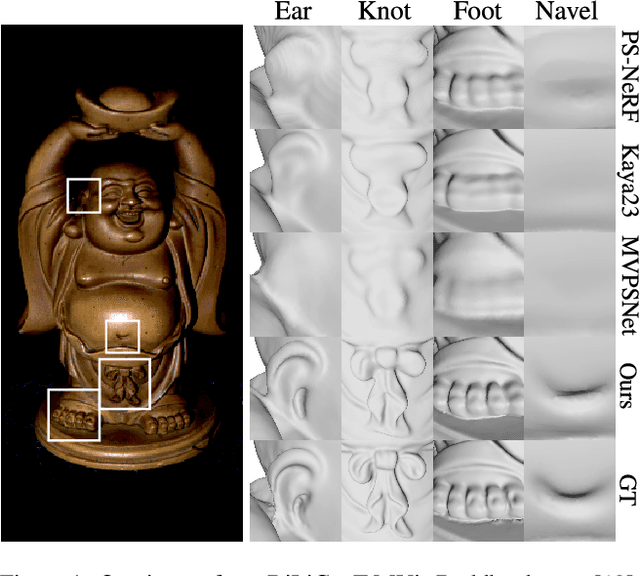
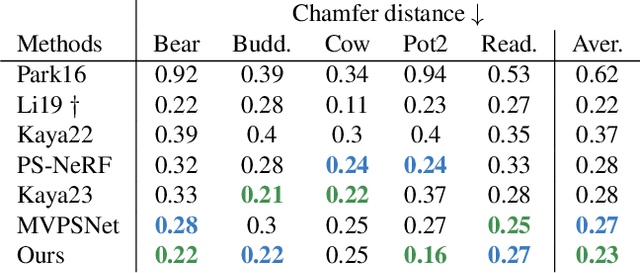
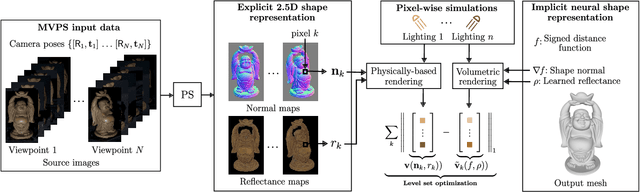
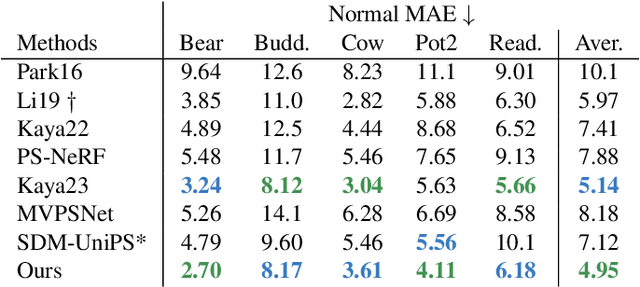
This paper introduces a versatile paradigm for integrating multi-view reflectance and normal maps acquired through photometric stereo. Our approach employs a pixel-wise joint re-parameterization of reflectance and normal, considering them as a vector of radiances rendered under simulated, varying illumination. This re-parameterization enables the seamless integration of reflectance and normal maps as input data in neural volume rendering-based 3D reconstruction while preserving a single optimization objective. In contrast, recent multi-view photometric stereo (MVPS) methods depend on multiple, potentially conflicting objectives. Despite its apparent simplicity, our proposed approach outperforms state-of-the-art approaches in MVPS benchmarks across F-score, Chamfer distance, and mean angular error metrics. Notably, it significantly improves the detailed 3D reconstruction of areas with high curvature or low visibility.